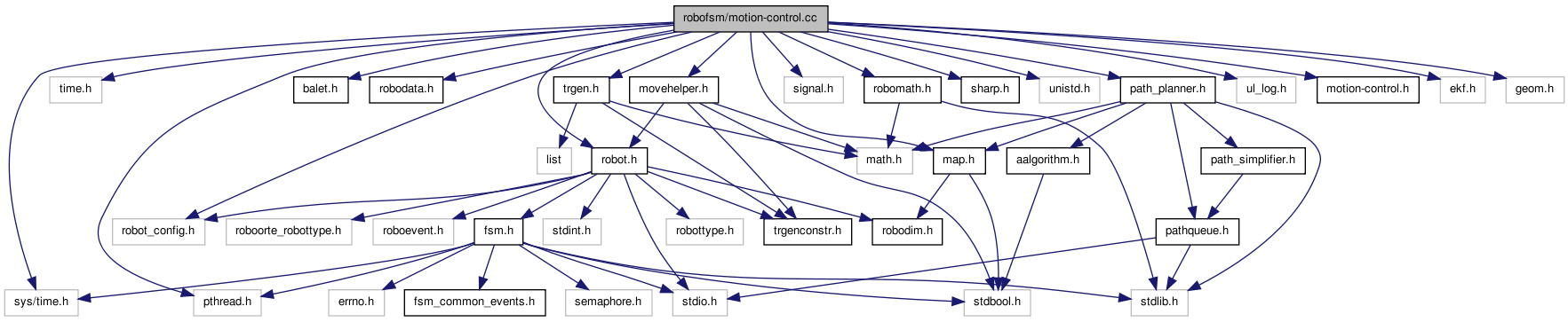
#include <sys/time.h>#include <time.h>#include "trgen.h"#include "balet.h"#include "robodata.h"#include <robot.h>#include <pthread.h>#include <path_planner.h>#include <signal.h>#include <movehelper.h>#include <sharp.h>#include <unistd.h>#include <map.h>#include "robot_config.h"#include <robomath.h>#include <ul_log.h>#include "motion-control.h"#include <ekf.h>#include <geom.h>
Include dependency graph for motion-control.cc:
Defines | |
| #define | DBG(format,...) |
| #define | DBGflush() |
| #define | MOTION_CONTROL |
| #define | SOUND_VELOCITY (331.3+0.606*20) |
| #define | XCORR2METER (SOUND_VELOCITY*(127.0/508.0)/3000.0) |
| #define | D_MAX (XCORR2METER*508.0) |
| #define | MAX_POS_ERROR_M 0.25 |
| If the distance of robot's estimated position from robot's requested position if above this value, the robot lost and we try to reset localization. | |
| #define | CLOSE_TO_TARGET_M 0.1 |
| If trajectory end is reached and robot's estimated position is closer than this distance, the movement is considered as "done". | |
| #define | MOTION_PERIOD_NS (50/*ms*/*1000*1000) |
| #define | MEASURE_TIMEOUT_NS (100/*ms*/*1000*1000) |
| #define | SIG_DO_CONTROL_NOW (SIGRTMIN+1) |
Functions | |
| UL_LOG_CUST (ulogd_motion_control) | |
| void * | thread_trajectory_follower (void *arg) |
| A thread running the controller. | |
| void | go (Trajectory *t, double append_time) |
Tells trajctory_follower to start moving along trajectory t. | |
| void | stop () |
| switches to newly calculated trajectory to go on it at specific time | |
| int | motion_control_init () |
| Initializes motion controller. | |
| void | motion_control_done () |
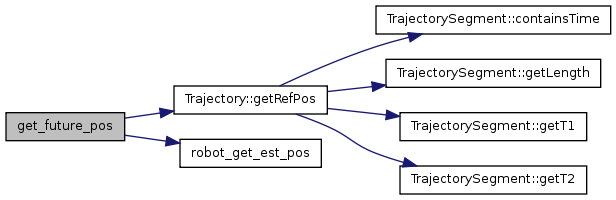
| void | get_future_pos (double rel_time_sec, Pos &pos, double &switch_time) |
Variables | |
| struct balet_params | k |
| sem_t | recalculation_not_running |
| sem_t | measurement_received |
| int | measurement_ok = 0 |
Determines way of thread_trajectory_follower() operation:
| |
Detailed Description
- Date:
- Fri Mar 20 10:36:59 2009
Define Documentation
| #define CLOSE_TO_TARGET_M 0.1 |
If trajectory end is reached and robot's estimated position is closer than this distance, the movement is considered as "done".
| #define D_MAX (XCORR2METER*508.0) |
| #define DBG | ( | format, | ||
| ... | ||||
| ) |
| #define DBGflush | ( | ) |
| #define MAX_POS_ERROR_M 0.25 |
If the distance of robot's estimated position from robot's requested position if above this value, the robot lost and we try to reset localization.
| #define MEASURE_TIMEOUT_NS (100/*ms*/*1000*1000) |
| #define MOTION_CONTROL |
| #define MOTION_PERIOD_NS (50/*ms*/*1000*1000) |
| #define SIG_DO_CONTROL_NOW (SIGRTMIN+1) |
| #define SOUND_VELOCITY (331.3+0.606*20) |
| #define XCORR2METER (SOUND_VELOCITY*(127.0/508.0)/3000.0) |
Function Documentation
| void get_future_pos | ( | double | rel_time_sec, | |
| Pos & | pos, | |||
| double & | switch_time | |||
| ) |
Here is the call graph for this function:
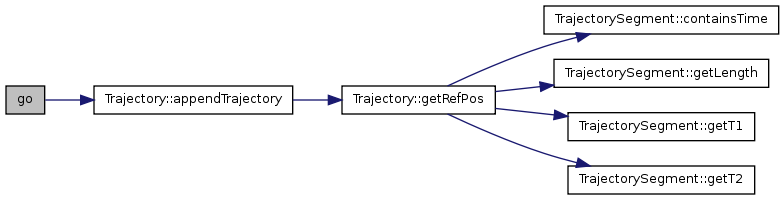
| void go | ( | Trajectory * | t, | |
| double | append_time | |||
| ) |
Tells trajctory_follower to start moving along trajectory t.
- Parameters:
-
t Trajectory to follow. append_time Relative time from the beginning of the actual_trajectorywhen to append the new one
Here is the call graph for this function:
| void motion_control_done | ( | void | ) |
Here is the caller graph for this function:

| int motion_control_init | ( | void | ) |
Initializes motion controller.
- Returns:
- Zero on success, non-zero otherwise.
Here is the call graph for this function:

Here is the caller graph for this function:

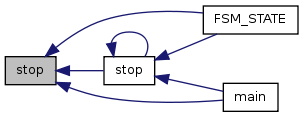
| void stop | ( | void | ) |
switches to newly calculated trajectory to go on it at specific time
Here is the call graph for this function:

Here is the caller graph for this function:
| void* thread_trajectory_follower | ( | void * | arg | ) |
A thread running the controller.
This (high priority) thread executes the motion control algorithm. It calculates repference position based on actual trajectory and current time. Then it calls "balet" controller to close feedback.
- Parameters:
-
arg
- Returns:
Here is the call graph for this function:

Here is the caller graph for this function:

| UL_LOG_CUST | ( | ulogd_motion_control | ) |
Variable Documentation
| struct balet_params k |
Initial value:
{
p_tangent: 3,
p_angle: 2,
p_perpen: 5
}
| int measurement_ok = 0 |
Determines way of thread_trajectory_follower() operation:
- 0 measurement doesn't work, controller invocation based on time (formerly CONFIG_OPEN_LOOP)
- 2 measurement works, controller invocation based on sem_post
- 1 measurement doesn't work and stop() was called.
| sem_t measurement_received |
