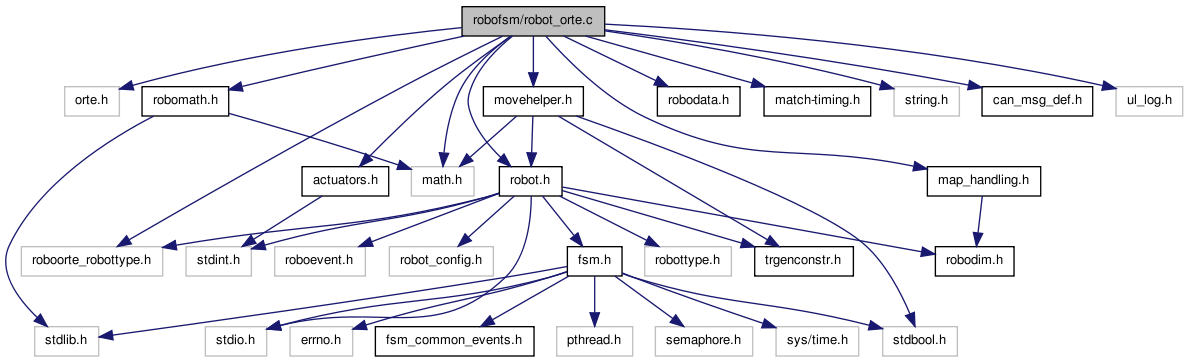
Module providing communication through ORTE. More...
#include <orte.h>#include <roboorte_robottype.h>#include "robodata.h"#include <robot.h>#include <movehelper.h>#include <math.h>#include <robomath.h>#include "map_handling.h"#include "match-timing.h"#include <string.h>#include <can_msg_def.h>#include <actuators.h>#include <ul_log.h>
Include dependency graph for robot_orte.c:
Defines | |
| #define | DBG(format,...) |
| #define | HIST_CNT 5 |
Functions | |
| UL_LOG_CUST (ulogd_robot_orte) | |
| void | send_ref_pos_cb (const ORTESendInfo *info, void *vinstance, void *sendCallBackParam) |
| void | send_est_pos_odo_cb (const ORTESendInfo *info, void *vinstance, void *sendCallBackParam) |
| void | send_est_pos_indep_odo_cb (const ORTESendInfo *info, void *vinstance, void *sendCallBackParam) |
| void | send_dummy_cb (const ORTESendInfo *info, void *vinstance, void *sendCallBackParam) |
| void | send_match_time_cb (const ORTESendInfo *info, void *vinstance, void *sendCallBackParam) |
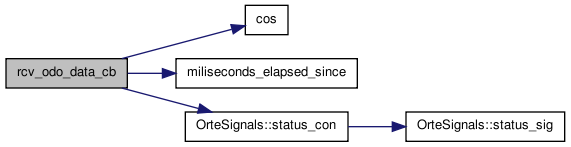
| void | rcv_odo_data_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_motion_irc_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_motion_speed_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_motion_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
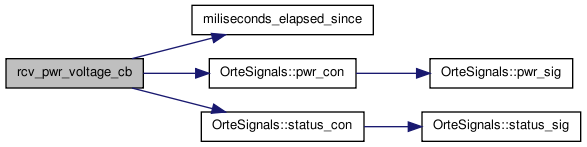
| void | rcv_pwr_voltage_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_pwr_ctrl_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
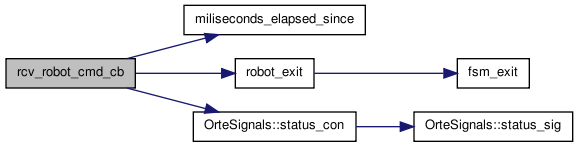
| void | rcv_robot_cmd_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_hokuyo_scan_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_camera_result_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_jaws_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_lift_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_robot_switches_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| Orte switches control callback function. | |
| void | rcv_robot_bumpers_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| int | robot_init_orte () |
Variables | |
| sem_t | measurement_received |
Detailed Description
Module providing communication through ORTE.
- Date:
- 2008-2010
Define Documentation
| #define DBG | ( | format, | ||
| ... | ||||
| ) |
| #define HIST_CNT 5 |
Function Documentation
| void rcv_camera_result_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
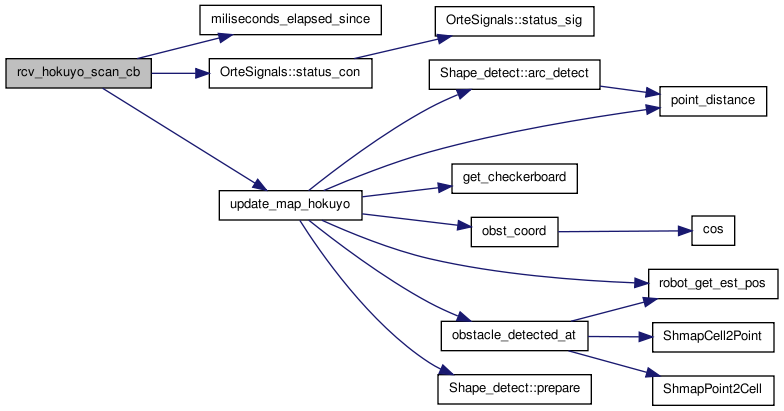
| void rcv_hokuyo_scan_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
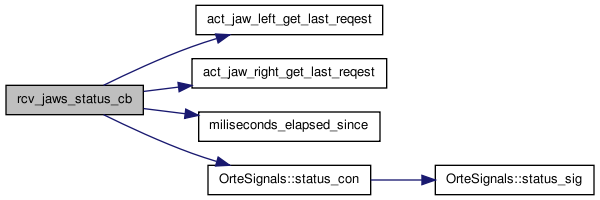
| void rcv_jaws_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
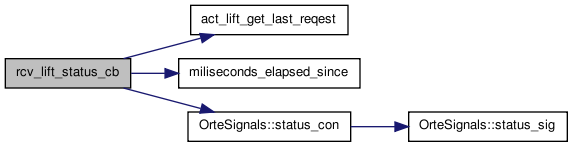
| void rcv_lift_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
| void rcv_motion_irc_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the caller graph for this function:

| void rcv_motion_speed_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
| void rcv_motion_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

| void rcv_odo_data_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
| void rcv_pwr_ctrl_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
| void rcv_pwr_voltage_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
| void rcv_robot_bumpers_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the caller graph for this function:

| void rcv_robot_cmd_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
| void rcv_robot_switches_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Orte switches control callback function.
Sets actual value of orte.robot_switches.team_color to robot_switches_color.
Here is the caller graph for this function:
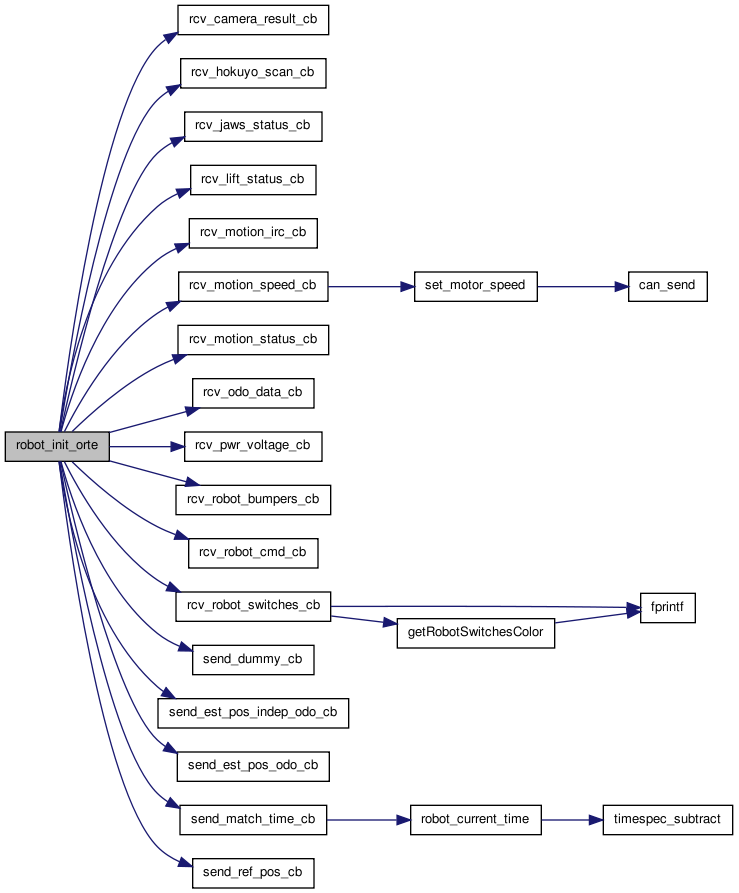
| int robot_init_orte | ( | ) |
Here is the call graph for this function:
| void send_dummy_cb | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | sendCallBackParam | |||
| ) |
| void send_est_pos_indep_odo_cb | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | sendCallBackParam | |||
| ) |
Here is the caller graph for this function:

| void send_est_pos_odo_cb | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | sendCallBackParam | |||
| ) |
Here is the caller graph for this function:

| void send_match_time_cb | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | sendCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void send_ref_pos_cb | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | sendCallBackParam | |||
| ) |
Here is the caller graph for this function:

| UL_LOG_CUST | ( | ulogd_robot_orte | ) |
Variable Documentation
| sem_t measurement_received |
