Interface between fsmmove and motion controller. More...
This graph shows which files directly or indirectly include this file:
Functions | |
| int | motion_control_init (void) |
| Initializes motion controller. | |
| void | motion_control_done (void) |
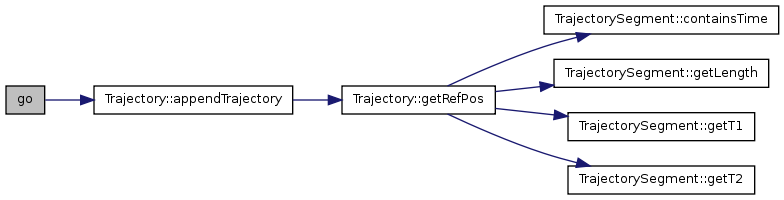
| void | go (Trajectory *t, double append_time) |
Tells trajctory_follower to start moving along trajectory t. | |
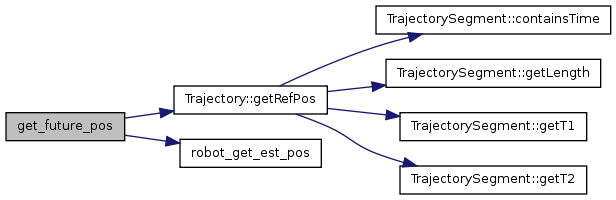
| void | get_future_pos (double rel_time_sec, Pos &pos, double &switch_time) |
| void | stop () |
| switches to newly calculated trajectory to go on it at specific time | |
Variables | |
| sem_t | recalculation_not_running |
| sem_t | measurement_received |
Detailed Description
Interface between fsmmove and motion controller.
- Date:
- Fri Mar 20 10:35:22 2009
Function Documentation
| void get_future_pos | ( | double | rel_time_sec, | |
| Pos & | pos, | |||
| double & | switch_time | |||
| ) |
Here is the call graph for this function:
| void go | ( | Trajectory * | t, | |
| double | append_time | |||
| ) |
Tells trajctory_follower to start moving along trajectory t.
- Parameters:
-
t Trajectory to follow. append_time Relative time from the beginning of the actual_trajectorywhen to append the new one
Here is the call graph for this function:
| void motion_control_done | ( | void | ) |
Here is the caller graph for this function:

| int motion_control_init | ( | void | ) |
Initializes motion controller.
- Returns:
- Zero on success, non-zero otherwise.
Here is the call graph for this function:

Here is the caller graph for this function:

| void stop | ( | ) |
switches to newly calculated trajectory to go on it at specific time
Here is the call graph for this function:
Here is the caller graph for this function:
Variable Documentation
| sem_t measurement_received |
