#include <stdbool.h>#include <robodim.h>
Include dependency graph for map.h:
This graph shows which files directly or indirectly include this file:

Classes | |
| struct | map_cell |
| struct | map |
Defines | |
| #define | MAP_NEW_OBSTACLE 255 |
| #define | MAP_NO_OBSTACLE 0 |
Map constaints | |
| #define | MAP_CELL_SIZE_MM 50 |
| Size of a cell in mm. | |
| #define | MAP_CELL_SIZE_M (MAP_CELL_SIZE_MM/1000.0) |
| Size of a cell in mm. | |
| #define | MAP_WIDTH (PLAYGROUND_WIDTH_MM / MAP_CELL_SIZE_MM) |
| Field width. | |
| #define | MAP_HEIGHT (PLAYGROUND_HEIGHT_MM / MAP_CELL_SIZE_MM) |
| Field height. | |
| #define | MAP_PLAYGROUND_WIDTH_MM (MAP_WIDTH*MAP_CELL_SIZE_MM) |
| Playground width depends on width and cell size. | |
| #define | MAP_PLAYGROUND_WIDTH_M (MAP_PLAYGROUND_WIDTH_MM/1000.0) |
| Size of a cell in mm. | |
| #define | MAP_PLAYGROUND_HEIGHT_MM (MAP_HEIGHT*MAP_CELL_SIZE_MM) |
| Playground width depends on height and cell size. | |
| #define | MAP_PLAYGROUND_HEIGHT_M (MAP_PLAYGROUND_HEIGHT_MM/1000.0) |
| Size of a cell in mm. | |
Cell Flags | |
| #define | MAP_FLAG_WALL 1 |
| Known wall. | |
| #define | MAP_FLAG_PATH 2 |
| Known wall. | |
| #define | MAP_FLAG_START 4 |
| Known wall. | |
| #define | MAP_FLAG_GOAL 8 |
| Known wall. | |
| #define | MAP_FLAG_DET_OBST 16 |
| Set when an obstacle is detected, cleard on every "map forget cycle". | |
| #define | MAP_FLAG_SIMULATED_WALL 32 |
| Used by robomon to simulate obstacles. | |
| #define | MAP_FLAG_IGNORE_OBST 64 |
| If obstacle is detected here, ignore it. | |
| #define | MAP_FLAG_PLAN_MARGIN 128 |
| "Safety margin" around obstacle - used only during A* planning and not during runtime obstacle avoidance. | |
| #define | MAP_FLAG_INVALIDATE_WALL 256 |
| Area, where the wall should be forgotten. | |
Shared Memory macros | |
| #define | SHM_MAP_KEY 555 |
| Key use to share the memory SHM. | |
Typedefs | |
| typedef unsigned int | map_cell_detobst_t |
| typedef unsigned int | map_cell_flag_t |
| typedef struct map_cell | MapCell |
Functions | |
| void | ShmapAllFreeSpace (void) |
| Initialize Map Memory with MAP_FREE value and MAP_FLAG_NO_FLAG flag. | |
| struct map * | ShmapInit (int init_flag) |
| Init Shared Map memory. | |
| void | ShmapFree (void) |
| Free Shared Map memory. | |
| void | ShmapDt (void) |
| Deatach Shared Map memory. | |
| struct map * | ShmapIsMapInit (void) |
| Check if Shared Map memory is init. | |
| void | ShmapPoint2Cell (double x, double y, int *cx, int *cy, bool *valid) |
| Translates real point coordinates (in meters) to cell grid coordinates. | |
| int | ShmapCell2Point (int ix, int iy, double *x, double *y) |
| Translates from cell grid coordinates to real coordinates. | |
| void | ShmapUpdateTmpObstacles (map_cell_detobst_t val) |
| int | ShmapIsFreeCell (int x, int y) |
| Give information about if a cell is free. | |
| int | ShmapIsFreePoint (double x_m, double y_m) |
| int | ShmapSetRectangleFlag (double x1, double y1, double x2, double y2, map_cell_flag_t set_flags, map_cell_flag_t clear_flags) |
| Creates an obstacle in the map. | |
| int | ShmapSetCircleFlag (double xs, double ys, double r, map_cell_flag_t set_flags, map_cell_flag_t clear_flags) |
| Creates an obstacle in the map with a square shape. | |
Variables | |
| struct map_cell | ShmapNoCell |
| See ShmapCellAtPoint(). | |
Define Documentation
| #define MAP_NEW_OBSTACLE 255 |
| #define MAP_NO_OBSTACLE 0 |
Typedef Documentation
| typedef unsigned int map_cell_detobst_t |
| typedef unsigned int map_cell_flag_t |
Function Documentation
| void ShmapAllFreeSpace | ( | void | ) |
| int ShmapCell2Point | ( | int | ix, | |
| int | iy, | |||
| double * | x, | |||
| double * | y | |||
| ) |
Translates from cell grid coordinates to real coordinates.
Coordinates set to x and *y are coordinates of the center of given cell.
- Parameters:
-
ix given x index of grid cell iy given y index of grid cell *x is set to real x coordinate corresponding to given ix *y is set to real y coordinate corresponding to given iy
- Returns:
- 0 if and only if given grid indices fall into playground, otherwise returns -1
Here is the caller graph for this function:
| void ShmapDt | ( | void | ) |
Deatach Shared Map memory.
| void ShmapFree | ( | void | ) |
| struct map* ShmapInit | ( | int | init_flag | ) | [read] |
Init Shared Map memory.
- Parameters:
-
init_flag 1 to init the map memory and set all cells with MAP_FREE and MAP_FLAG_NO_FLAG, 0 only init map
- Returns:
- Pointer to the map. In case of error, exit() is called.
This function allocates memory for shared map if this memory does not exists.
Here is the call graph for this function:

Here is the caller graph for this function:
| int ShmapIsFreeCell | ( | int | x, | |
| int | y | |||
| ) |
Give information about if a cell is free.
- Parameters:
-
x Coordonate of a cell y Coordonate of a cell
- Returns:
- 1 if the cell is not an obstacle, -1 if the cell is not in the map, 0 otherwise
Following cells are consider as free cells: MAP_START, MAP_GOAL, MAP_PATH, MAP_FREE.
Here is the caller graph for this function:
| int ShmapIsFreePoint | ( | double | x_m, | |
| double | y_m | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
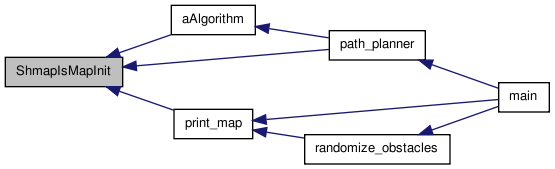
| struct map* ShmapIsMapInit | ( | void | ) | [read] |
Check if Shared Map memory is init.
- Returns:
- Pointer to the map or NULL if not initialized.
Here is the caller graph for this function:
| void ShmapPoint2Cell | ( | double | x, | |
| double | y, | |||
| int * | ix, | |||
| int * | iy, | |||
| bool * | valid | |||
| ) |
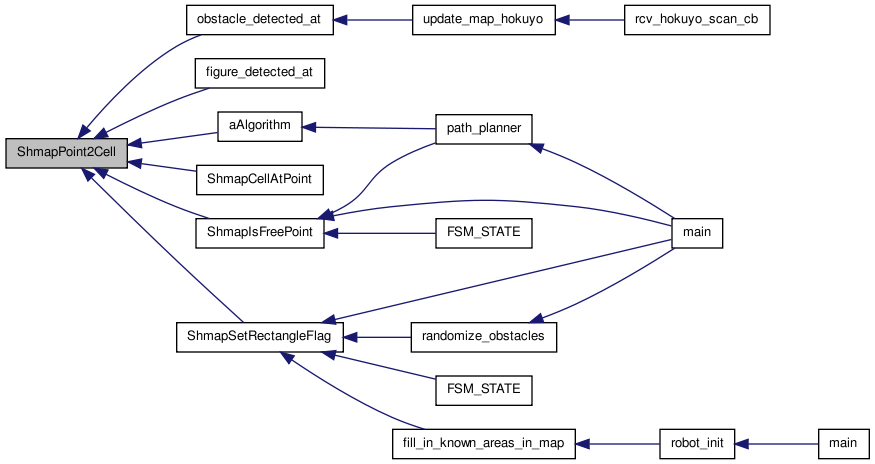
Translates real point coordinates (in meters) to cell grid coordinates.
- Parameters:
-
x given x coordinate [meters] y given y coordinate [meters] *ix referenced int is set to grid index corresponding to x *iy referenced int is set to grid index corresponding to y *valid referenced bool is set to true if and only if position given by (x,y) falls into playground
Here is the caller graph for this function:
| int ShmapSetCircleFlag | ( | double | xs, | |
| double | ys, | |||
| double | r, | |||
| map_cell_flag_t | set_flags, | |||
| map_cell_flag_t | clear_flags | |||
| ) |
Creates an obstacle in the map with a square shape.
- Parameters:
-
xs Coordonate X (in m) of the central point ys Coordonate Y (in m) of the central point r Radius (in m) cell Type of obstacle.
Here is the call graph for this function:

Here is the caller graph for this function:

| int ShmapSetRectangleFlag | ( | double | x1, | |
| double | y1, | |||
| double | x2, | |||
| double | y2, | |||
| map_cell_flag_t | set_flags, | |||
| map_cell_flag_t | clear_flags | |||
| ) |
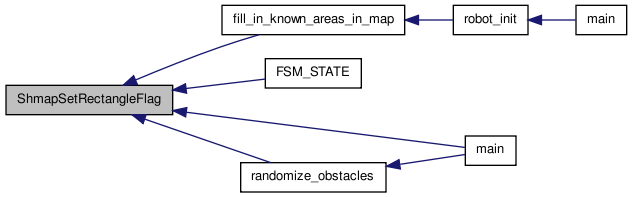
Creates an obstacle in the map.
- Parameters:
-
x1 Coordonate X (in m) of the first point y1 Coordonate Y (in m) of the first point x2 Coordonate X (in m) of the second point y2 Coordonate Y (in m) of the second point cell Type of obstacle.
Here is the call graph for this function:

Here is the caller graph for this function:
| void ShmapUpdateTmpObstacles | ( | map_cell_detobst_t | val | ) |
Variable Documentation
| struct map_cell ShmapNoCell |
See ShmapCellAtPoint().
