#include <stdint.h>#include <stdio.h>#include <trgenconstr.h>#include <robottype.h>#include <roboorte_robottype.h>#include <robodim.h>#include <roboevent.h>#include <fsm.h>#include <robot_config.h>
Include dependency graph for robot.h:

This graph shows which files directly or indirectly include this file:

Classes | |
| struct | robot |
Defines | |
| #define | ROBOT_FSM_MAIN main |
| FSM. | |
| #define | ROBOT_FSM_MOTION motion |
| #define | ROBOT_FSM_DISPLAY display |
| #define | ROBOT_FSM_ACT act |
| #define | FSM_GET_BY_ID(fsm_id) (&robot.fsm.ROBOT_FSM_##fsm_id) |
| #define | __LOCK_CHECK(mutex) |
| LOCKING MANIPULATION. | |
| #define | __UNLOCK_CHECK(mutex) |
| #define | ROBOT_LOCK(var) |
| Locks the robot structure. | |
| #define | ROBOT_UNLOCK(var) |
| Unlocks the robot structure. | |
| #define | __robot_lock_ref_pos lock_ref_pos |
| #define | __robot_lock_est_pos_odo lock_est_pos_odo |
| #define | __robot_lock_est_pos_indep_odo lock_est_pos_indep_odo |
| #define | __robot_lock_joy_data lock_joy_data |
| #define | __robot_lock_meas_angles lock_meas_angles |
| #define | __robot_lock_drives lock |
| #define | __robot_lock_sharps lock |
| #define | __robot_lock_hokuyo lock |
| #define | __robot_lock_cmu lock |
| #define | __robot_lock_bumper lock |
| #define | __robot_lock_disp lock_disp |
| #define | __robot_lock_motion_irc lock |
| #define | __robot_lock_odo_data lock |
| #define | __robot_lock_corr_distances lock |
| #define | __robot_lock_camera_result lock_camera |
| #define | THREAD_PRIO_TRAJ_FOLLOWER 90 |
| #define | THREAD_PRIO_TRAJ_RECLAC 18 |
| #define | OBST_FORGETING_PRIO 17 |
Enumerations | |
| enum | team_color { RED = 0, BLUE } |
robot.h 08/04/20 More... | |
| enum | robot_start_state { POWER_ON = 0, START_PLUGGED_IN, COMPETITION_STARTED } |
| enum | robot_status { STATUS_OK, STATUS_WARNING, STATUS_FAILED } |
| enum | robot_component { COMPONENT_MOTOR, COMPONENT_ODOMETRY, COMPONENT_CAMERA, COMPONENT_POWER, COMPONENT_HOKUYO, COMPONENT_START, COMPONENT_JAWS, COMPONENT_LIFT, ROBOT_COMPONENT_NUMBER } |
Functions | |
| int | robot_init () __attribute__((warn_unused_result)) |
| Initializes the robot. | |
| int | robot_start () __attribute__((warn_unused_result)) |
| Starts the robot FSMs and threads. | |
| void | robot_exit () |
| Signals all the robot threads to finish. | |
| void | robot_destroy () |
| Stops the robot. | |
| void | robot_get_est_pos_trans (double *x, double *y, double *phi) |
| void | robot_get_est_pos (double *x, double *y, double *phi) |
| void | serial_comm (int status) |
| FSM_STATE_FULL_DECL (main, init) | |
| FSM_STATE_FULL_DECL (motion, init) | |
| FSM_STATE_FULL_DECL (disp, init) | |
| FSM_STATE_FULL_DECL (act, wait_for_command) | |
Variables | |
| struct robot | robot |
Define Documentation
| #define __LOCK_CHECK | ( | mutex | ) |
LOCKING MANIPULATION.
| #define __robot_lock_bumper lock |
| #define __robot_lock_camera_result lock_camera |
| #define __robot_lock_cmu lock |
| #define __robot_lock_corr_distances lock |
| #define __robot_lock_disp lock_disp |
| #define __robot_lock_drives lock |
| #define __robot_lock_est_pos_indep_odo lock_est_pos_indep_odo |
| #define __robot_lock_est_pos_odo lock_est_pos_odo |
| #define __robot_lock_hokuyo lock |
| #define __robot_lock_joy_data lock_joy_data |
| #define __robot_lock_meas_angles lock_meas_angles |
| #define __robot_lock_motion_irc lock |
| #define __robot_lock_odo_data lock |
| #define __robot_lock_ref_pos lock_ref_pos |
| #define __robot_lock_sharps lock |
| #define __UNLOCK_CHECK | ( | mutex | ) |
| #define FSM_GET_BY_ID | ( | fsm_id | ) | (&robot.fsm.ROBOT_FSM_##fsm_id) |
| #define OBST_FORGETING_PRIO 17 |
| #define ROBOT_FSM_ACT act |
| #define ROBOT_FSM_DISPLAY display |
| #define ROBOT_FSM_MAIN main |
FSM.
| #define ROBOT_FSM_MOTION motion |
| #define ROBOT_LOCK | ( | var | ) |
Value:
do { \ pthread_mutex_lock(&robot.__robot_lock_##var); \ __LOCK_CHECK(&robot.__robot_lock_##var); \ } while(0)
Locks the robot structure.
- Parameters:
-
var Field in the structure you are going to work with.
| #define ROBOT_UNLOCK | ( | var | ) |
Value:
do { \ __UNLOCK_CHECK(&robot.__robot_lock_##var); \ pthread_mutex_unlock(&robot.__robot_lock_##var); \ } while(0)
Unlocks the robot structure.
- Parameters:
-
var Field in the structure, which was locked by ROBOT_LOCK.
| #define THREAD_PRIO_TRAJ_FOLLOWER 90 |
| #define THREAD_PRIO_TRAJ_RECLAC 18 |
Enumeration Type Documentation
| enum robot_component |
| enum robot_start_state |
| enum robot_status |
| enum team_color |
Function Documentation
| FSM_STATE_FULL_DECL | ( | main | , | |
| init | ||||
| ) |
| FSM_STATE_FULL_DECL | ( | act | , | |
| wait_for_command | ||||
| ) |
| FSM_STATE_FULL_DECL | ( | motion | , | |
| init | ||||
| ) |
| FSM_STATE_FULL_DECL | ( | disp | , | |
| init | ||||
| ) |
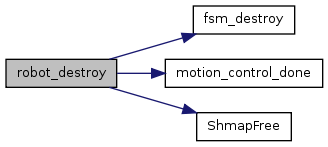
| void robot_destroy | ( | ) |
Stops the robot.
All resources alocated by robot_init() or robot_start() are dealocated here.
Here is the call graph for this function:
Here is the caller graph for this function:

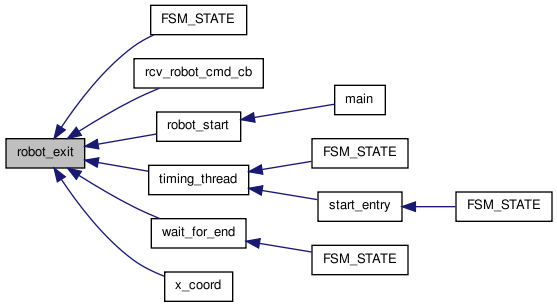
| void robot_exit | ( | ) |
Signals all the robot threads to finish.
Here is the call graph for this function:

Here is the caller graph for this function:
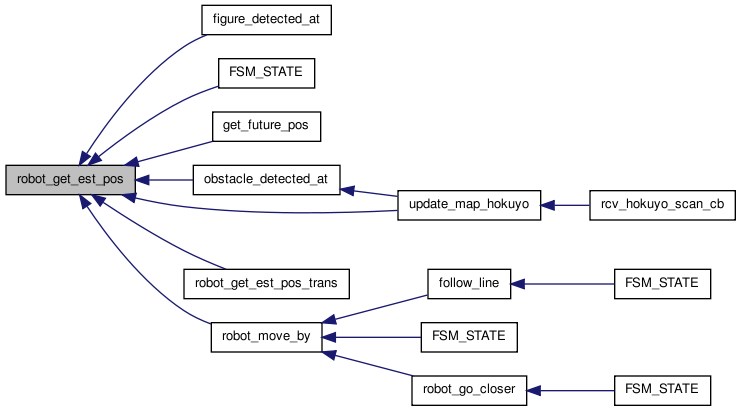
| void robot_get_est_pos | ( | double * | x, | |
| double * | y, | |||
| double * | phi | |||
| ) |
Here is the caller graph for this function:
| void robot_get_est_pos_trans | ( | double * | x, | |
| double * | y, | |||
| double * | phi | |||
| ) |
Here is the call graph for this function:

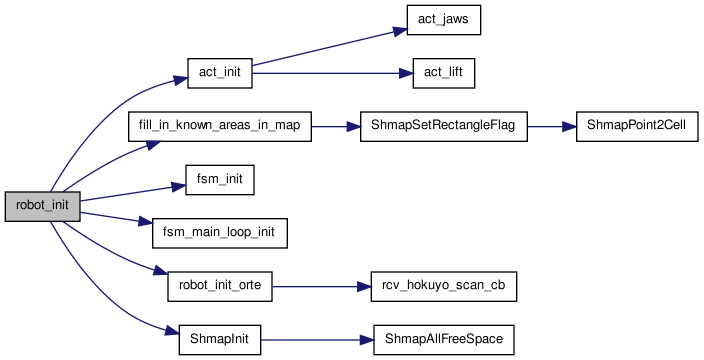
| int robot_init | ( | ) |
Initializes the robot.
Setup fields in robot structure, initializes FSMs and ORTE.
- Returns:
- 0
Here is the call graph for this function:
Here is the caller graph for this function:
| int robot_start | ( | ) |
Starts the robot FSMs and threads.
- Returns:
- 0
Here is the call graph for this function:
Here is the caller graph for this function:

| void serial_comm | ( | int | status | ) |
