#include <map.h>#include <movehelper.h>#include <pthread.h>#include <robomath.h>#include <robot.h>#include <robot_orte.h>#include <signal.h>#include <sys/time.h>#include <time.h>#include <unistd.h>#include "map_handling.h"#include <string.h>#include "actuators.h"#include <robodim.h>#include <ul_log.h>#include "motion-control.h"
Include dependency graph for robot.c:

Defines | |
| #define | _XOPEN_SOURCE 500 |
| #define | MOTION_CONTROL_INIT_ONLY |
Functions | |
| UL_LOG_CUST (ulogd_robot) | |
| void | fill_in_known_areas_in_map () |
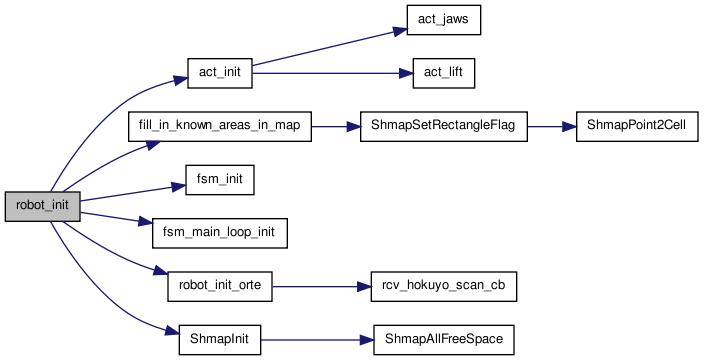
| int | robot_init () |
| Initializes the robot. | |
| int | robot_start () |
| Starts the robot FSMs and threads. | |
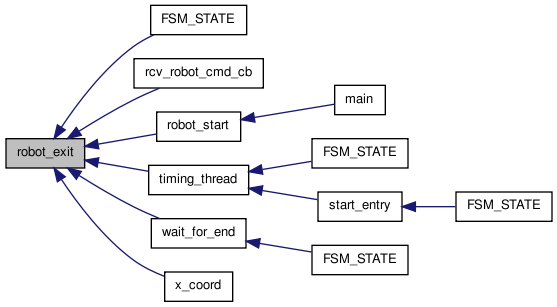
| void | robot_exit () |
| Signals all the robot threads to finish. | |
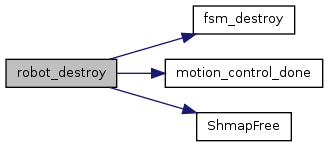
| void | robot_destroy () |
| Stops the robot. | |
| void | robot_get_est_pos_trans (double *x, double *y, double *phi) |
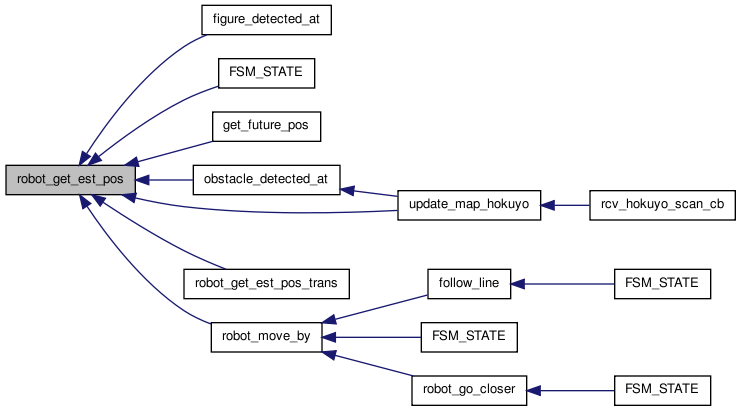
| void | robot_get_est_pos (double *x, double *y, double *phi) |
Variables | |
| struct robot | robot |
Define Documentation
| #define _XOPEN_SOURCE 500 |
| #define MOTION_CONTROL_INIT_ONLY |
Function Documentation
| void fill_in_known_areas_in_map | ( | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void robot_destroy | ( | ) |
Stops the robot.
All resources alocated by robot_init() or robot_start() are dealocated here.
Here is the call graph for this function:
Here is the caller graph for this function:

| void robot_exit | ( | ) |
Signals all the robot threads to finish.
Here is the call graph for this function:

Here is the caller graph for this function:
| void robot_get_est_pos | ( | double * | x, | |
| double * | y, | |||
| double * | phi | |||
| ) |
Here is the caller graph for this function:
| void robot_get_est_pos_trans | ( | double * | x, | |
| double * | y, | |||
| double * | phi | |||
| ) |
Here is the call graph for this function:

| int robot_init | ( | ) |
Initializes the robot.
Setup fields in robot structure, initializes FSMs and ORTE.
- Returns:
- 0
Here is the call graph for this function:
Here is the caller graph for this function:
| int robot_start | ( | ) |
Starts the robot FSMs and threads.
- Returns:
- 0
Here is the call graph for this function:
Here is the caller graph for this function:

| UL_LOG_CUST | ( | ulogd_robot | ) |
