#include <robot.h>
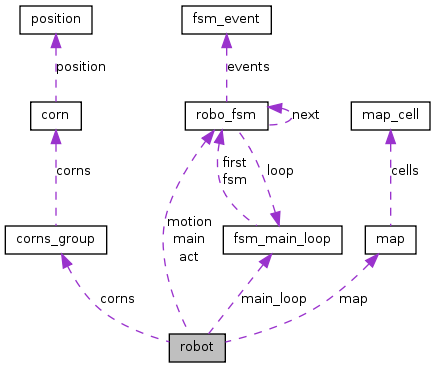
Collaboration diagram for robot:
Public Attributes | |
| pthread_mutex_t | lock |
| pthread_mutex_t | lock_ref_pos |
| pthread_mutex_t | lock_est_pos_odo |
| pthread_mutex_t | lock_est_pos_indep_odo |
| pthread_mutex_t | lock_meas_angles |
| pthread_mutex_t | lock_joy_data |
| pthread_mutex_t | lock_disp |
| pthread_mutex_t | lock_camera |
| enum team_color | team_color |
| enum robot_start_state | start_state |
| State variable used for controlling the robot by pluggin in and out start connector. | |
| void * | new_trajectory |
| Temporary storage for new trajectory. | |
| unsigned char | isTrajectory |
| sem_t | start |
| struct fsm_main_loop | main_loop |
| struct { | |
| struct robo_fsm main | |
| struct robo_fsm motion | |
| struct robo_fsm act | |
| } | fsm |
| struct robot_pos_type | ref_pos |
| struct robot_pos_type | est_pos_odo |
| struct robot_pos_type | est_pos_indep_odo |
| bool | odometry_works |
| True if est_pos_odo is updated according to reception of motion_irc. | |
| bool | indep_odometry_works |
| True if est_pos_indep_odo is updated according to reception of motion_indep_odo. | |
| bool | use_back_bumpers |
| bool | use_left_bumper |
| bool | use_right_bumper |
| bool | moves_backward |
| True iff at least one wheel rotates backward. | |
| bool | motion_irc_received |
| struct robottype_orte_data | orte |
| struct motion_irc_type | motion_irc |
| struct odo_data_type | odo_data |
| struct corr_distances_type | corr_distances |
| struct hokuyo_scan_type | hokuyo |
| bool | ignore_hokuyo |
| struct map * | map |
| enum robot_status | status [ROBOT_COMPONENT_NUMBER] |
| char | corns_conf_center |
| char | corns_conf_side |
| struct corns_group * | corns |
| bool | obstacle_avoidance_enabled |
| bool | short_time_to_end |
| is set to true in separate thread when there is short time left | |
| bool | check_turn_safety |
Member Data Documentation
| struct robo_fsm robot::act |
| struct corns_group* robot::corns |
| struct corr_distances_type robot::corr_distances |
| struct robot_pos_type robot::est_pos_indep_odo |
| struct robot_pos_type robot::est_pos_odo |
| struct { ... } robot::fsm |
| struct hokuyo_scan_type robot::hokuyo |
| bool robot::ignore_hokuyo |
True if est_pos_indep_odo is updated according to reception of motion_indep_odo.
| unsigned char robot::isTrajectory |
| pthread_mutex_t robot::lock |
| pthread_mutex_t robot::lock_camera |
| pthread_mutex_t robot::lock_disp |
| pthread_mutex_t robot::lock_est_pos_indep_odo |
| pthread_mutex_t robot::lock_est_pos_odo |
| pthread_mutex_t robot::lock_joy_data |
| pthread_mutex_t robot::lock_meas_angles |
| pthread_mutex_t robot::lock_ref_pos |
| struct robo_fsm robot::main |
| struct fsm_main_loop robot::main_loop |
| struct map* robot::map |
| struct robo_fsm robot::motion |
| struct motion_irc_type robot::motion_irc |
True iff at least one wheel rotates backward.
| void* robot::new_trajectory |
Temporary storage for new trajectory.
After the trajectory creation is finished, this trajectory is submitted to fsmmove.
| struct odo_data_type robot::odo_data |
True if est_pos_odo is updated according to reception of motion_irc.
| struct robottype_orte_data robot::orte |
| struct robot_pos_type robot::ref_pos |
is set to true in separate thread when there is short time left
| sem_t robot::start |
State variable used for controlling the robot by pluggin in and out start connector.
| enum robot_status robot::status[ROBOT_COMPONENT_NUMBER] |
The documentation for this struct was generated from the following file:
- robofsm/robot.h
