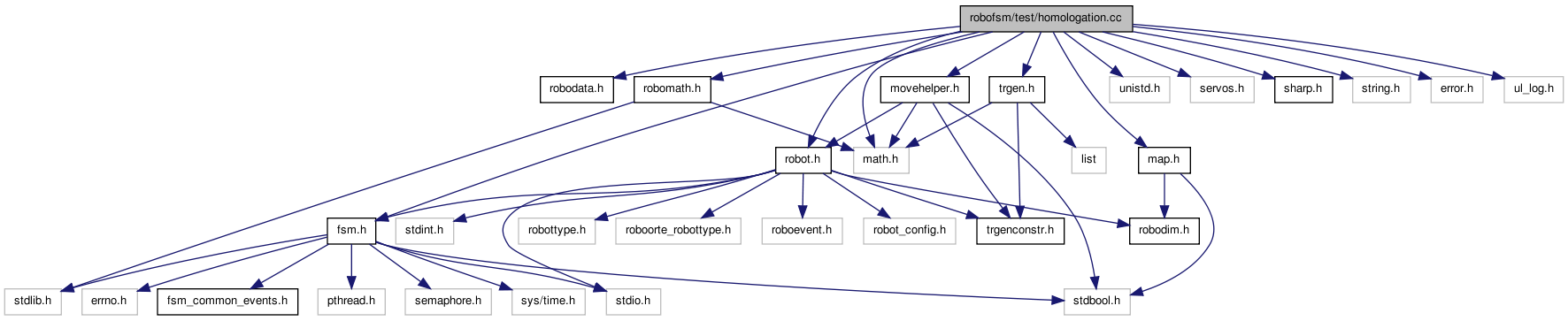
#include <robodata.h>#include <robot.h>#include <fsm.h>#include <unistd.h>#include <servos.h>#include <math.h>#include "trgen.h"#include <movehelper.h>#include <map.h>#include <sharp.h>#include <robomath.h>#include <string.h>#include <error.h>#include <ul_log.h>
Include dependency graph for homologation.cc:
Defines | |
| #define | FSM_MAIN |
| #define | COMPETITION_TIME_DEFAULT 900 |
| #define | TIME_TO_DEPOSITE_DEFAULT 60 |
| #define | COMPETITION_TIME COMPETITION_TIME_DEFAULT |
| #define | TIME_TO_DEPOSITE TIME_TO_DEPOSITE_DEFAULT |
| #define | GO_TO_CONTAINER_TIMER 10000 |
| #define | MAX_GET_BALL_ATTEMPS 8 |
| #define | GET_BALL_TIMER 1500 |
| #define | WAIT_BALL_INSIDE 5000 |
| #define | GET_BALL_BAGR_SPEED 130 |
| #define | MAX_CAROUSEL_ATTEMPTS 3 |
| #define | CAROUSEL_ATTEMPT_TIMER 1000 |
| #define | WAIT_FOR_DEPOSITION_TIMER 1500 |
Enumerations | |
| enum | { LEFT = 0, RIGHT, CENTER } |
Functions | |
| UL_LOG_CUST (ulogd_homologation) | |
| void | get_back_sharp_mm (int *sharp) |
| Convert back sharps' measured values to mm. | |
| void | get_rear_sharp_mm (int *sharp) |
| Convert rear sharps' measured values to mm. | |
| void | get_front_sharp_mm (int *sharp) |
| Convert front sharps' measured values to mm. | |
| void | get_front_sharp_m (double *sharp) |
| Get values from front sharps. | |
| void | get_rear_sharp_m (double *sharp) |
| Get values from rear sharps. | |
| void | get_back_sharp_m (double *sharp) |
| Get values from back sharps. | |
| int | closed_to_dispenser () |
| Use bumpers check if we are closed to the dispenser. | |
| int | closed_to_container () |
| void * | wait_for_end (void *arg) |
| Competition timer. | |
| void * | wait_to_deposition (void *arg) |
| Timer to go to tray. | |
| void | get_relative_pos (struct est_pos_type *est, struct ref_pos_type *ref, double l, double phi) |
| Get position of the point when we know the distance and angle to turn. | |
| void | robot_goto_point (struct ref_pos_type des_pos) |
| void | robot_go_closer () |
| void | trans_callback (struct robo_fsm *fsm) |
| void | move_trans_callback (struct robo_fsm *fsm) |
| FSM_STATE_DECL (init) | |
| FSM_STATE_DECL (wait_for_start) | |
| FSM_STATE_DECL (go_to_our_white_dispenser) | |
| FSM_STATE_DECL (go_to_our_white_dispenser2) | |
| FSM_STATE_DECL (go_to_container) | |
| FSM_STATE_DECL (go_back) | |
| FSM_STATE_DECL (get_balls) | |
| FSM_STATE_DECL (next_carousel_position) | |
| FSM_STATE_DECL (deposite_balls) | |
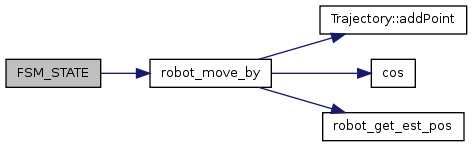
| FSM_STATE (init) | |
| FSM_STATE (wait_for_start) | |
| FSM_STATE (go_to_our_white_dispenser) | |
| FSM_STATE (go_to_our_white_dispenser2) | |
| FSM_STATE (go_to_our_red_dispenser) | |
| FSM_STATE (go_to_our_red_dispenser2) | |
| FSM_STATE (go_back) | |
| FSM_STATE (go_to_container) | |
| FSM_STATE (get_balls) | |
| FSM_STATE (next_carousel_position) | |
| FSM_STATE (deposite_balls) | |
| int | main () |
Define Documentation
| #define CAROUSEL_ATTEMPT_TIMER 1000 |
| #define COMPETITION_TIME COMPETITION_TIME_DEFAULT |
| #define COMPETITION_TIME_DEFAULT 900 |
| #define FSM_MAIN |
| #define GET_BALL_BAGR_SPEED 130 |
| #define GET_BALL_TIMER 1500 |
| #define GO_TO_CONTAINER_TIMER 10000 |
| #define MAX_CAROUSEL_ATTEMPTS 3 |
| #define MAX_GET_BALL_ATTEMPS 8 |
| #define TIME_TO_DEPOSITE TIME_TO_DEPOSITE_DEFAULT |
| #define TIME_TO_DEPOSITE_DEFAULT 60 |
| #define WAIT_BALL_INSIDE 5000 |
| #define WAIT_FOR_DEPOSITION_TIMER 1500 |
Enumeration Type Documentation
Function Documentation
| int closed_to_container | ( | ) |
| int closed_to_dispenser | ( | ) |
Use bumpers check if we are closed to the dispenser.
Here is the call graph for this function:

Here is the caller graph for this function:

| FSM_STATE | ( | go_back | ) |
Here is the call graph for this function:
| FSM_STATE | ( | go_to_container | ) |
| FSM_STATE | ( | get_balls | ) |
| FSM_STATE | ( | next_carousel_position | ) |
| FSM_STATE | ( | deposite_balls | ) |
| FSM_STATE | ( | go_to_our_red_dispenser2 | ) |
Here is the call graph for this function:
| FSM_STATE | ( | init | ) |
| FSM_STATE | ( | wait_for_start | ) |
Here is the call graph for this function:

| FSM_STATE | ( | go_to_our_white_dispenser | ) |
Here is the call graph for this function:

| FSM_STATE | ( | go_to_our_white_dispenser2 | ) |
Here is the call graph for this function:

| FSM_STATE | ( | go_to_our_red_dispenser | ) |
Here is the call graph for this function:

| FSM_STATE_DECL | ( | init | ) |
| FSM_STATE_DECL | ( | wait_for_start | ) |
| FSM_STATE_DECL | ( | get_balls | ) |
| FSM_STATE_DECL | ( | go_to_our_white_dispenser | ) |
| FSM_STATE_DECL | ( | go_to_our_white_dispenser2 | ) |
| FSM_STATE_DECL | ( | go_to_container | ) |
| FSM_STATE_DECL | ( | go_back | ) |
| FSM_STATE_DECL | ( | next_carousel_position | ) |
| FSM_STATE_DECL | ( | deposite_balls | ) |
| void get_back_sharp_m | ( | double * | sharp | ) |
Get values from back sharps.
| void get_back_sharp_mm | ( | int * | sharp | ) |
Convert back sharps' measured values to mm.
| void get_front_sharp_m | ( | double * | sharp | ) |
Get values from front sharps.
| void get_front_sharp_mm | ( | int * | sharp | ) |
Convert front sharps' measured values to mm.
| void get_rear_sharp_m | ( | double * | sharp | ) |
Get values from rear sharps.
| void get_rear_sharp_mm | ( | int * | sharp | ) |
Convert rear sharps' measured values to mm.
| void get_relative_pos | ( | struct est_pos_type * | est, | |
| struct ref_pos_type * | ref, | |||
| double | l, | |||
| double | phi | |||
| ) |
Get position of the point when we know the distance and angle to turn.
- Parameters:
-
act actual position pos countered position
Here is the call graph for this function:

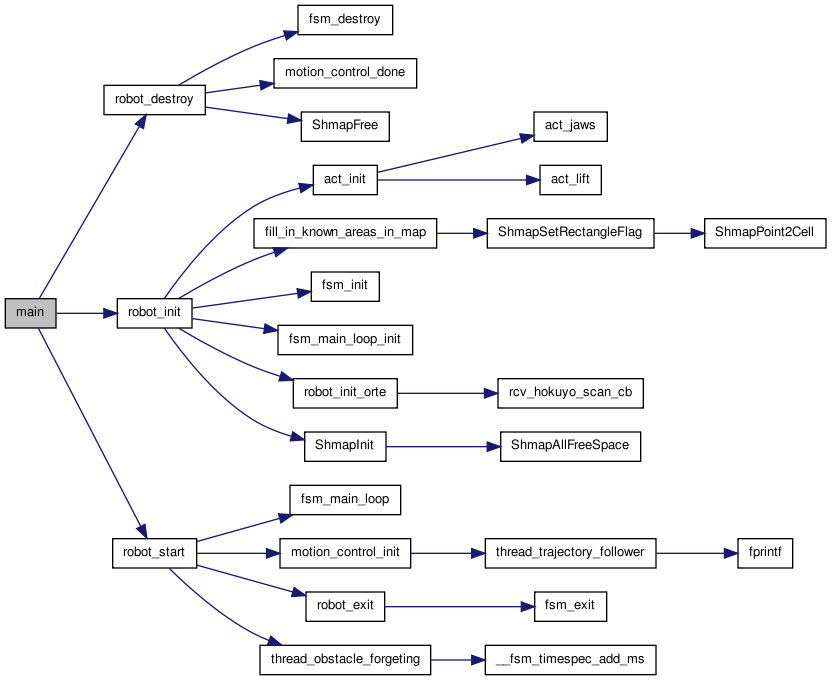
| int main | ( | void | ) |
Here is the call graph for this function:
| void move_trans_callback | ( | struct robo_fsm * | fsm | ) |
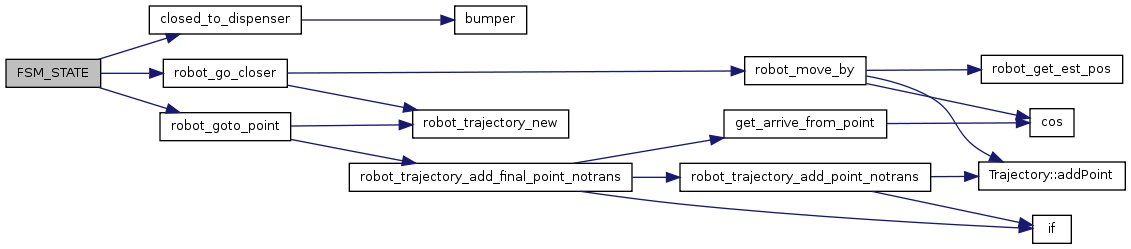
| void robot_go_closer | ( | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void robot_goto_point | ( | struct ref_pos_type | des_pos | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void trans_callback | ( | struct robo_fsm * | fsm | ) |
| UL_LOG_CUST | ( | ulogd_homologation | ) |
| void* wait_for_end | ( | void * | arg | ) |
Competition timer.
Stop robot when the timer exceeds.
Here is the call graph for this function:

| void* wait_to_deposition | ( | void * | arg | ) |
Timer to go to tray.
Here is the caller graph for this function:

