Useful functions related map. More...
#include "map.h"#include <sys/shm.h>#include <stdlib.h>#include <stdio.h>#include <sys/stat.h>#include <math.h>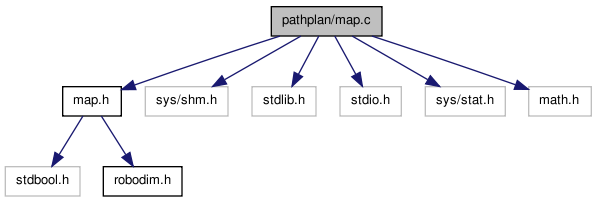
Functions | |
Shared Memory Map related functions | |
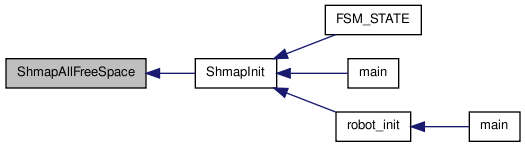
| struct map * | ShmapInit (int init_flag) |
| Init Shared Map memory. | |
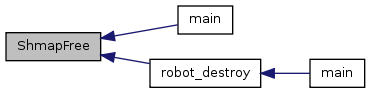
| void | ShmapFree (void) |
| Free Shared Map memory. | |
| void | ShmapDt (void) |
| Deatach Shared Map memory. | |
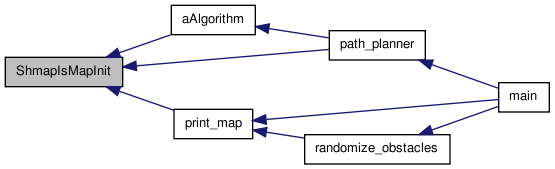
| struct map * | ShmapIsMapInit (void) |
| Check if Shared Map memory is init. | |
Coordonates translation | |
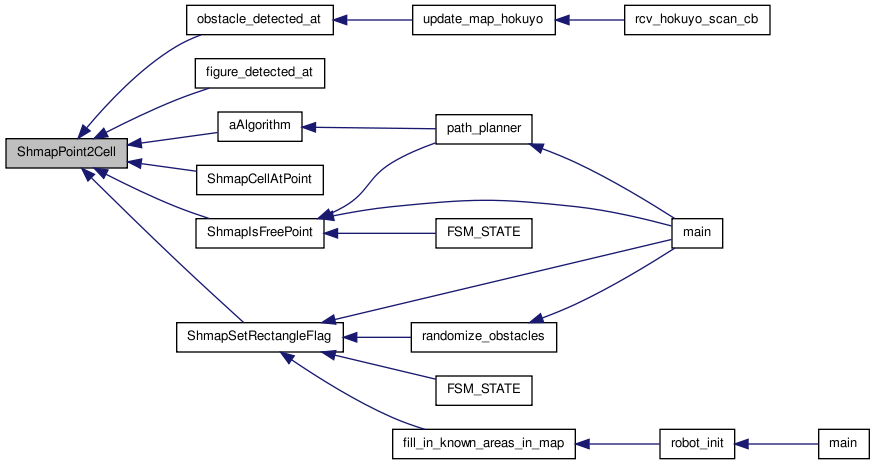
| void | ShmapPoint2Cell (double x, double y, int *ix, int *iy, bool *valid) |
| Translates real point coordinates (in meters) to cell grid coordinates. | |
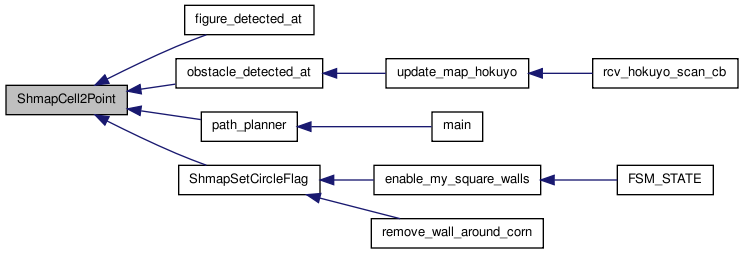
| int | ShmapCell2Point (int ix, int iy, double *x, double *y) |
| Translates from cell grid coordinates to real coordinates. | |
Variables | |
| struct map * | map = NULL |
| int | shmap_id |
Map manage | |
|
| |
| struct map_cell | ShmapNoCell |
| See ShmapCellAtPoint(). | |
| void | ShmapAllFreeSpace (void) |
| Initialize Map Memory with MAP_FREE value and MAP_FLAG_NO_FLAG flag. | |
| struct map_cell * | ShmapCellAtPoint (double x_m, double y_m) |
| Put a value in a point. | |
| int | ShmapIsFreeCell (int x, int y) |
| Give information about if a cell is free. | |
| int | ShmapIsFreePoint (double x_m, double y_m) |
| See ShmapCellAtPoint(). | |
| int | ShmapSetCircleFlag (double xs, double ys, double r, map_cell_flag_t set_flags, map_cell_flag_t clear_flags) |
| Creates an obstacle in the map with a square shape. | |
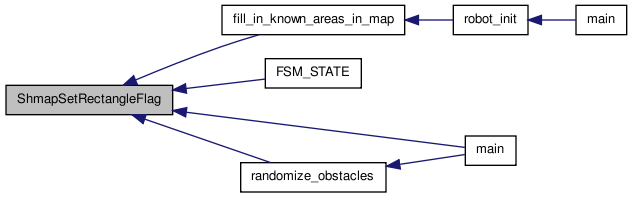
| int | ShmapSetRectangleFlag (double x1, double y1, double x2, double y2, map_cell_flag_t set_flags, map_cell_flag_t clear_flags) |
| Creates an obstacle in the map. | |
Detailed Description
Useful functions related map.
This file contains functions to manage map. The map should be accessed only by this library.
- Todo:
- Lock the map! It necessary in multi-thread programs. If while we are doing something in the map, somewhere the function ShmapFree() is called, segfault occurs.
Function Documentation
| void ShmapAllFreeSpace | ( | void | ) |
| int ShmapCell2Point | ( | int | ix, | |
| int | iy, | |||
| double * | x, | |||
| double * | y | |||
| ) |
Translates from cell grid coordinates to real coordinates.
Coordinates set to x and *y are coordinates of the center of given cell.
- Parameters:
-
ix given x index of grid cell iy given y index of grid cell *x is set to real x coordinate corresponding to given ix *y is set to real y coordinate corresponding to given iy
- Returns:
- 0 if and only if given grid indices fall into playground, otherwise returns -1
| struct map_cell* ShmapCellAtPoint | ( | double | x_m, | |
| double | y_m | |||
| ) | [read] |
Put a value in a point.
- Parameters:
-
x_m Coordonate X (in m) of a point y_m Coordonate Y (in m) of a point value Value of the point
- Returns:
- Pointer to the cell. If coordinates are outside of the map, pointer to ShmapNoCell is returned.

| void ShmapDt | ( | void | ) |
Deatach Shared Map memory.
| void ShmapFree | ( | void | ) |
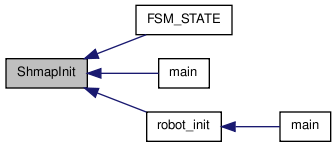
| struct map* ShmapInit | ( | int | init_flag | ) | [read] |
Init Shared Map memory.
- Parameters:
-
init_flag 1 to init the map memory and set all cells with MAP_FREE and MAP_FLAG_NO_FLAG, 0 only init map
- Returns:
- Pointer to the map. In case of error, exit() is called.
This function allocates memory for shared map if this memory does not exists.
- Examples:
- testmap.c.

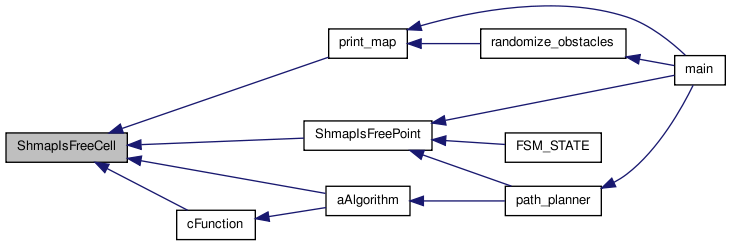
| int ShmapIsFreeCell | ( | int | x, | |
| int | y | |||
| ) |
Give information about if a cell is free.
- Parameters:
-
x Coordonate of a cell y Coordonate of a cell
- Returns:
- 1 if the cell is not an obstacle, -1 if the cell is not in the map, 0 otherwise
Following cells are consider as free cells: MAP_START, MAP_GOAL, MAP_PATH, MAP_FREE.
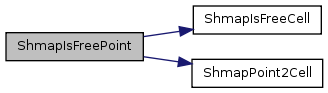
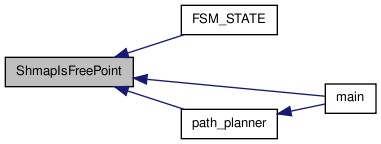
| int ShmapIsFreePoint | ( | double | x_m, | |
| double | y_m | |||
| ) |
See ShmapCellAtPoint().
| struct map* ShmapIsMapInit | ( | void | ) | [read] |
Check if Shared Map memory is init.
- Returns:
- Pointer to the map or NULL if not initialized.
| void ShmapPoint2Cell | ( | double | x, | |
| double | y, | |||
| int * | ix, | |||
| int * | iy, | |||
| bool * | valid | |||
| ) |
Translates real point coordinates (in meters) to cell grid coordinates.
- Parameters:
-
x given x coordinate [meters] y given y coordinate [meters] *ix referenced int is set to grid index corresponding to x *iy referenced int is set to grid index corresponding to y *valid referenced bool is set to true if and only if position given by (x,y) falls into playground
| int ShmapSetCircleFlag | ( | double | xs, | |
| double | ys, | |||
| double | r, | |||
| map_cell_flag_t | set_flags, | |||
| map_cell_flag_t | clear_flags | |||
| ) |
Creates an obstacle in the map with a square shape.
- Parameters:
-
xs Coordonate X (in m) of the central point ys Coordonate Y (in m) of the central point r Radius (in m) cell Type of obstacle.


| int ShmapSetRectangleFlag | ( | double | x1, | |
| double | y1, | |||
| double | x2, | |||
| double | y2, | |||
| map_cell_flag_t | set_flags, | |||
| map_cell_flag_t | clear_flags | |||
| ) |
Creates an obstacle in the map.
- Parameters:
-
x1 Coordonate X (in m) of the first point y1 Coordonate Y (in m) of the first point x2 Coordonate X (in m) of the second point y2 Coordonate Y (in m) of the second point cell Type of obstacle.
- Examples:
- testmap.c.

Variable Documentation
| int shmap_id |
| struct map_cell ShmapNoCell |
See ShmapCellAtPoint().
