Library shape_detect is used for detection of line segments in data measured by a laser scanner. More...
Classes | |
| class | Shape_detect |
| There are detected line segments in input array of measured data (laser_scan) by using perpendicular line regression. More... | |
| struct | Shape_detect::General_form |
| General equation of line -> Ax + By + C = 0. More... | |
| struct | Shape_detect::Point |
| Point expressed in cartesian coordinates. More... | |
| struct | Shape_detect::Line |
| Line defined by two points which are expressed in cartesian coordinates. More... | |
| struct | Shape_detect::Arc |
| Arc defined by TODO. More... | |
Files | |
| file | offline.cc |
Debug file for testing detection shape. | |
| file | online.cc |
Debug file for testing detection shape. | |
| file | shape_detect.cc |
Functions | |
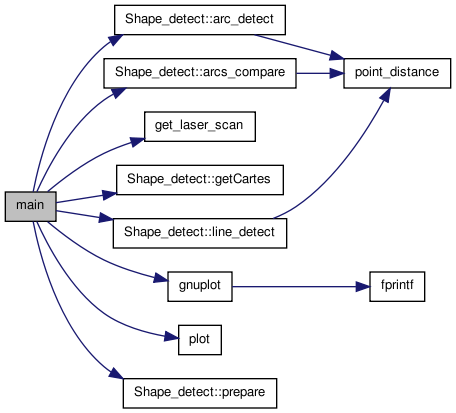
| int | main (int argc, char **argv) |
| There are detected line segments in input file (laser scan data). | |
| Shape_detect::Shape_detect (void) | |
| The constructor with default setting of detection properties (for Hokuyo). | |
| Shape_detect::Shape_detect (int line_min_points, int line_error_threshold, int max_distance_point, float radius, float scale, int arc_min_points, int arc_max_distance) | |
| The constructor for other setting than default setting of detection properties. | |
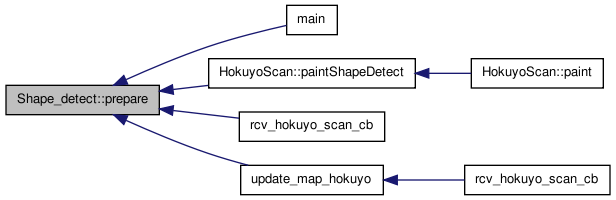
| void | Shape_detect::prepare (const unsigned short laser_scan[]) |
| TODO. | |
| std::vector< Point > & | Shape_detect::getCartes () |
| Returns laser_scan data set by prepare converted to cartesian coordinates. | |
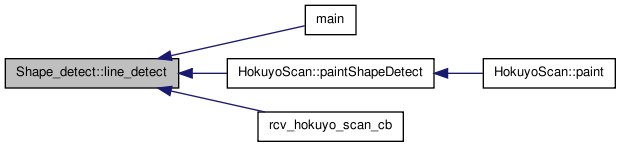
| void | Shape_detect::line_detect (std::vector< Line > &lines) |
| There are detected line segments in input array of measured data by using perpendicular line regression. | |
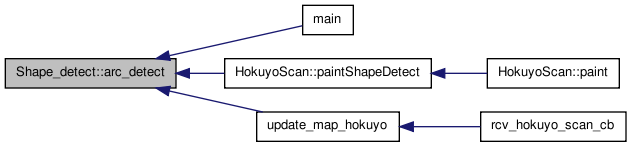
| void | Shape_detect::arc_detect (std::vector< Arc > &arcs) |
| There are detected line segments in input array of measured data. | |
| std::vector< Arc > | Shape_detect::arcs_compare (std::vector< Arc > &first, std::vector< Arc > &second, int eps) |
| Is uset for comparing of two detected arcs vectors. | |
Detailed Description
Library shape_detect is used for detection of line segments in data measured by a laser scanner.
Content:
Introduction
The input of the algorithm is represented by array laser_scan (type unsigned short) which contains data expressed in polar coordinates. The first step is data conversion from polar coordinates to vector whose points are expressed in cartesian coordinates. The section includes filtering of errors in the scanned data which are represented by values lower then 20.
In the next is divided pointvector in dependence on parameter max_distance_point. Some line segment is searched by recursion in the individual parts of pointvector by perpendicular line regression. The line segment is detected or set is divided to achievement of parametersize line_min_points.
The founded line is written into output vector lines. The method line_detect is finished after research of all vectorparts.
Debugging
The debug mode permits detection of segment lines with connected laser scanner or from scanned data, which are saved in a file. There is a program shape_detect_offline, which takes the measured data (generated for example by hokuyo-dump command) and writes out the detected lines. It can also plot the results using gnuplot (-g option).
Example
In the file main.cc are introduced examples of using class Shape_detect. The first step is creation of classinstance by constructor calling (default setting for Hokuyo or with applicable parameters). After that it is possible preparation of output vector for saving founded segment line and calling method shape_detect with applicable parameters.
The first example is work illustration with connected laser scanner Hokuyo.
#include <shape_detect.h> #include <roboorte_robottype.h> void rcv_hokuyo_scan_cb(const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) { Shape_detect sd; struct hokuyo_scan_type *instance = (struct hokuyo_scan_type *)vinstance; static int count = 0; switch (info->status) { case NEW_DATA: { printf("Scan\n"); if (++count >= 2) { printf("Detect\n"); count = 0; std::vector<Shape_detect::Line> output; sd.prepare(instance->data); sd.line_detect(output); } break; } case DEADLINE: printf("Deadline\n"); break; } } struct robottype_orte_data orte; int robot_init_orte() { int rv = 0; rv = robottype_roboorte_init(&orte); if (rv) return rv; robottype_subscriber_hokuyo_scan_create(&orte, rcv_hokuyo_scan_cb, &orte); return rv; } int main() { robot_init_orte(); return 0; }
References
Fast line, arc/circle and leg detection from laser scan data in a Player driver, http://w3.ualg.pt/~dcastro/a1738.pdf
Mathpages, Perpendicular regression of a line, http://mathpages.com/home/kmath110.htm
Function Documentation
| void Shape_detect::arc_detect | ( | std::vector< Arc > & | arcs | ) | [inherited] |
There are detected line segments in input array of measured data.
- Parameters:
-
[out] &arcs vector which contains detected arcs.

| std::vector< Shape_detect::Arc > Shape_detect::arcs_compare | ( | std::vector< Arc > & | first, | |
| std::vector< Arc > & | second, | |||
| int | eps | |||
| ) | [inherited] |
Is uset for comparing of two detected arcs vectors.
- Parameters:
-
&first is vector for comparing. &second is vector for comparing. eps is pertubation measured center of arc.
- Returns:
- vector equality center of arc.


| std::vector< Shape_detect::Point > & Shape_detect::getCartes | ( | ) | [inherited] |
Returns laser_scan data set by prepare converted to cartesian coordinates.

| void Shape_detect::line_detect | ( | std::vector< Line > & | lines | ) | [inherited] |
There are detected line segments in input array of measured data by using perpendicular line regression.
- Parameters:
-
[out] &lines vector which contains detected lines.

| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
There are detected line segments in input file (laser scan data).
- Parameters:
-
argv name input file with measured data
| void Shape_detect::prepare | ( | const unsigned short | laser_scan[] | ) | [inherited] |
TODO.
- Parameters:
-
[in] laser_scan contains laser scanned data.
| Shape_detect::Shape_detect | ( | int | line_min_points, | |
| int | line_error_threshold, | |||
| int | max_distance_point, | |||
| float | radius, | |||
| float | scale, | |||
| int | arc_min_points, | |||
| int | arc_max_distance | |||
| ) | [inherited] |
The constructor for other setting than default setting of detection properties.
- Parameters:
-
line_min_points the minimal number of points which can create segment line. line_error_threshold the maximal pointerror from segment line of regression. max_distance_point the maximal Euclidean distance of point. radius the radius detected arc. scale is precision detected center of arc. arc_min_points the minimal number of points which can create arc. arc_max_distance the maximal distance detected arc from origin coordinates [0; 0]
| Shape_detect::Shape_detect | ( | void | ) | [inherited] |
The constructor with default setting of detection properties (for Hokuyo).
Line_min_points = 7 Line_error_threshold = 20 Max_distance_point = 300 Radius = 100 Scale = 10 Arc_min_points = 10 Arc_max_distance = 1000
