Convenience functions for motion control. More...
#include <trgen.h>#include "robodata.h"#include <robot.h>#include <movehelper.h>#include <path_simplifier.h>#include <stdio.h>#include <stdlib.h>#include <sys/stat.h>#include <math.h>#include <map.h>#include <robomath.h>#include <mcl_robot.h>#include <string.h>#include <ul_log.h>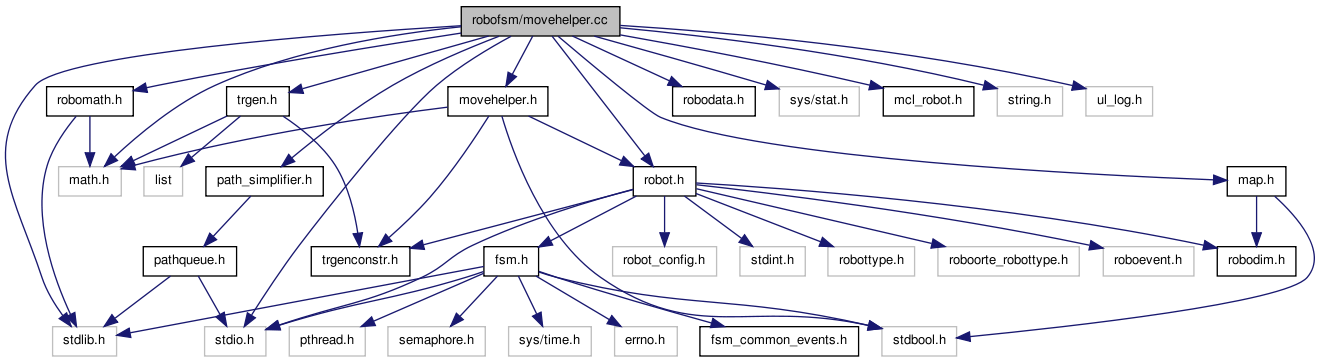
Functions | |
| UL_LOG_CUST (ulogd_movehelper) | |
| void | robot_trajectory_new (struct TrajectoryConstraints *tc) |
| Initializes new trajectory object for adding points. | |
| void | robot_trajectory_new_backward (struct TrajectoryConstraints *tc) |
| void | robot_set_est_pos_notrans (double x, double y, double phi) |
| Sets actual position of the robot and with respoect to color of the team. | |
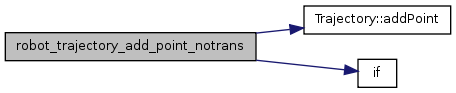
| void | robot_trajectory_add_point_notrans (double x_m, double y_m) |
| Adds point in absolute coordinates to previously initialized trajectory object. | |
| bool | get_arrive_from_point (double target_x_m, double target_y_m, struct move_target_heading heading, double *point_x_m, double *point_y_m) |
| void | robot_trajectory_add_final_point_notrans (double x_m, double y_m, struct move_target_heading heading) |
| Adds final point to trajectory objects and starts robot movement. | |
| void | robot_stop () |
| Stops actual movement. | |
| void | robot_send_speed (double left, double right) |
| void | robot_goto_notrans (double x, double y, struct move_target_heading heading, struct TrajectoryConstraints *tc) |
| Makes move the robot to a target position. | |
| void | robot_moveto_notrans (double x, double y, struct move_target_heading heading, struct TrajectoryConstraints *tc) |
| Move to a point using straight line trajectory. | |
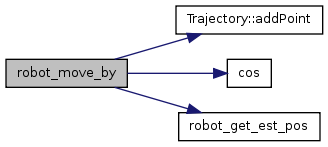
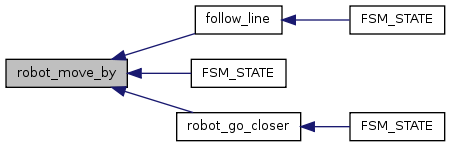
| void | robot_move_by (double distance, struct move_target_heading heading, struct TrajectoryConstraints *tc) |
| Move robot forward or backward. | |
Variables | |
| struct TrajectoryConstraints | trajectoryConstraintsDefault |
| bool | init_ekf_flag = false |
Detailed Description
Convenience functions for motion control.
- Date:
- Wed Jun 13 13:27:58 2007
Function Documentation
| bool get_arrive_from_point | ( | double | target_x_m, | |
| double | target_y_m, | |||
| struct move_target_heading | heading, | |||
| double * | point_x_m, | |||
| double * | point_y_m | |||
| ) |


| void robot_goto_notrans | ( | double | x, | |
| double | y, | |||
| struct move_target_heading | heading, | |||
| struct TrajectoryConstraints * | tc | |||
| ) |
Makes move the robot to a target position.
Go to a point using path planning to avoid apriori known obstacles.
Use path panner to find the trajectory. This function is intended to be called from main FSM.
- Parameters:
-
x X coordinate in meters. y Y coordinate in meters. heading Desired heading of the robot at goal point.

| void robot_move_by | ( | double | distance, | |
| struct move_target_heading | heading, | |||
| struct TrajectoryConstraints * | tc | |||
| ) |
Move robot forward or backward.
- Parameters:
-
distance Distance in meters ( >0 forward, <0 backward) heading Final heading tc Trajectory constrains
| void robot_moveto_notrans | ( | double | x, | |
| double | y, | |||
| struct move_target_heading | heading, | |||
| struct TrajectoryConstraints * | tc | |||
| ) |
Move to a point using straight line trajectory.
If ARIVE_FROM is set, then the trajectory will be composed two lines.... TODO
| void robot_send_speed | ( | double | left, | |
| double | right | |||
| ) |

| void robot_set_est_pos_notrans | ( | double | x, | |
| double | y, | |||
| double | phi | |||
| ) |
Sets actual position of the robot and with respoect to color of the team.
Should be used for setting initial position of the robot.
| void robot_stop | ( | ) |
Stops actual movement.
Stop robot immediately.
| void robot_trajectory_add_final_point_notrans | ( | double | x_m, | |
| double | y_m, | |||
| struct move_target_heading | heading | |||
| ) |
Adds final point to trajectory objects and starts robot movement.
- Parameters:
-
x_m X coordinate in meters. y_m Y coordinate in meters. heading Desired heading (in degrees) of the robot in this point. NAN means don't care. Positive number or zero means turn counter-clockwise, negative number means turn clockwise. Example: DEG2RAD(90) means turn up counter-clockwise and DEG2RAD(-270) means turn up clockwise.


| void robot_trajectory_add_point_notrans | ( | double | x_m, | |
| double | y_m | |||
| ) |
Adds point in absolute coordinates to previously initialized trajectory object.
- Parameters:
-
x_m X coordinate in meters. y_m Y coordinate in meters.

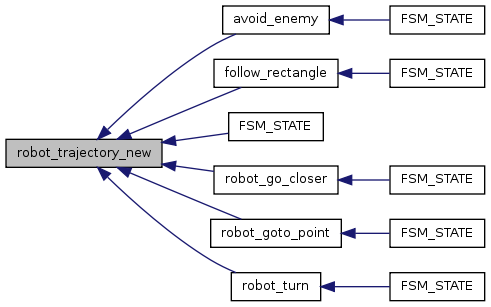
| void robot_trajectory_new | ( | struct TrajectoryConstraints * | tc | ) |
Initializes new trajectory object for adding points.
Path planner will not be used.
- Parameters:
-
tc Constrains for the trajectory.
| void robot_trajectory_new_backward | ( | struct TrajectoryConstraints * | tc | ) |

| UL_LOG_CUST | ( | ulogd_movehelper | ) |
Variable Documentation
| bool init_ekf_flag = false |
{
maxv: 1,
maxomega: 1,
maxangacc: 1,
maxacc: 1,
maxcenacc: 1,
maxe: (double)ROBOT_WIDTH_MM/2.0/1000.0
}
