URG control. More...
#include "math_utils.h"#include "urg_ctrl.h"#include "scip_handler.h"#include "urg_errno.h"#include "serial_ctrl.h"#include "serial_utils.h"#include "serial_errno.h"#include "ticks.h"#include "delay.h"#include <string.h>#include <stdlib.h>#include <stdio.h>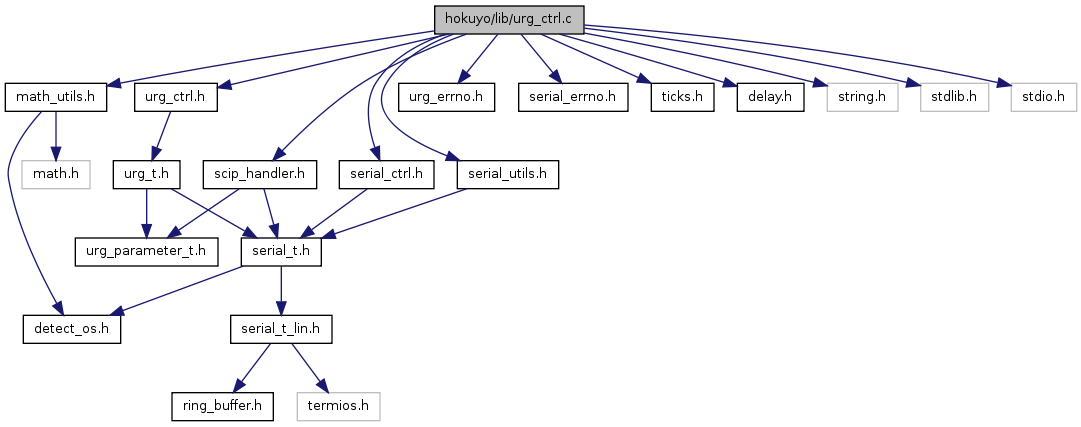
Enumerations | |
| enum | { ScipTimeout = 1000, EachTimeout = 100 * 2, InvalidRange = -1 } |
Functions | |
| void | urg_initialize (urg_t *urg) |
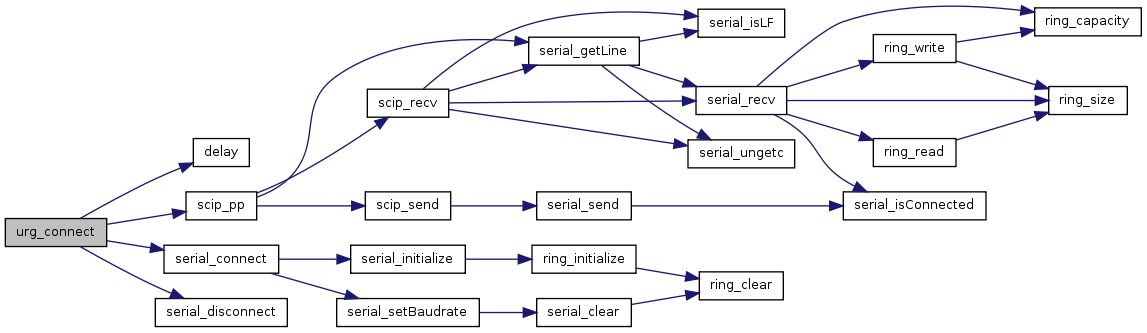
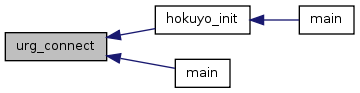
| int | urg_connect (urg_t *urg, const char *device, long baudrate) |
| Connection. | |
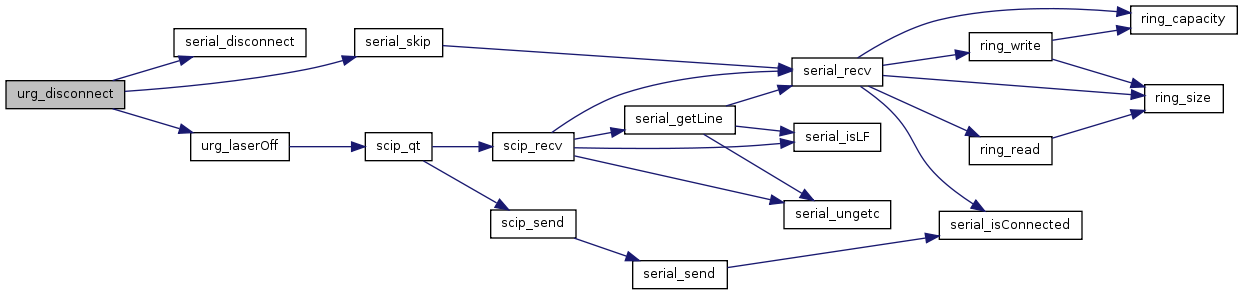
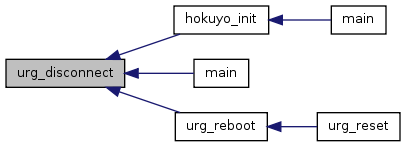
| void | urg_disconnect (urg_t *urg) |
| Disconnection. | |
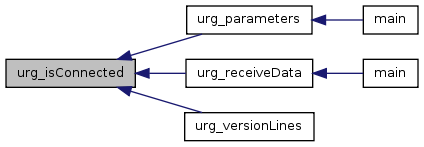
| int | urg_isConnected (const urg_t *urg) |
| Checks whether connected or not and returns the result. | |
| const char * | urg_error (const urg_t *urg) |
| Get error message. | |
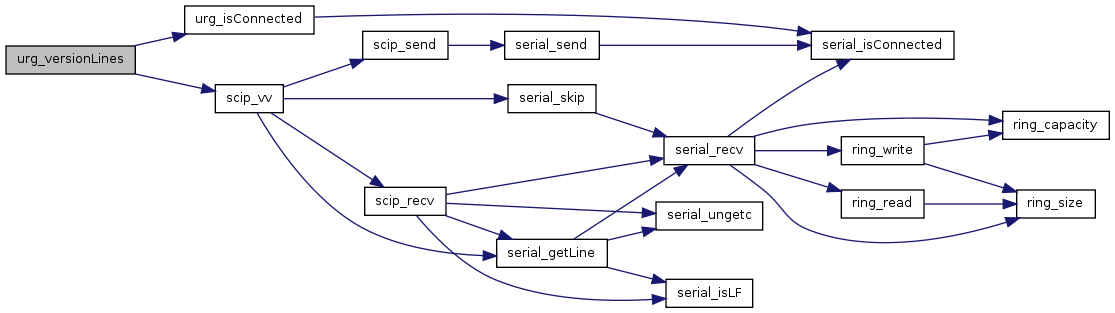
| int | urg_versionLines (urg_t *urg, char *lines[], int lines_max) |
| Get string containing version information. | |
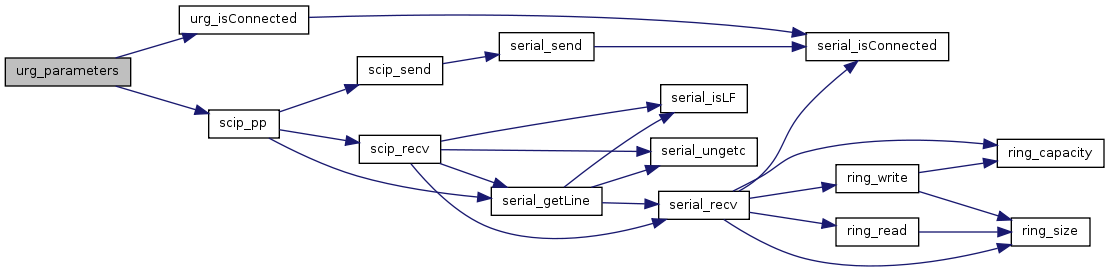
| int | urg_parameters (urg_t *urg, urg_parameter_t *parameters) |
| URG Returns parameter. | |
| const char * | urg_model (const urg_t *urg) |
| URG Returns the sensor type. | |
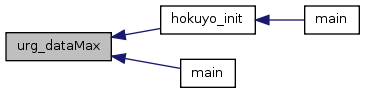
| int | urg_dataMax (const urg_t *urg) |
| Returns the number of maximum data obtained in one scan. | |
| int | urg_scanMsec (const urg_t *urg) |
| Returns measurement time taken for one scan. | |
| long | urg_maxDistance (const urg_t *urg) |
| Maximum measurable distance. | |
| long | urg_minDistance (const urg_t *urg) |
| Minimum measureable distance. | |
| int | urg_setSkipLines (urg_t *urg, int lines) |
| Sets the number of lines to be skiped. | |
| int | urg_setSkipFrames (urg_t *urg, int frames) |
| Sets number of scans to be skipped. | |
| int | urg_setCaptureTimes (urg_t *urg, int times) |
| Sets number of times the data to be acquired . | |
| int | urg_remainCaptureTimes (const urg_t *urg) |
| Get number of remaining times on MD/MS capture. | |
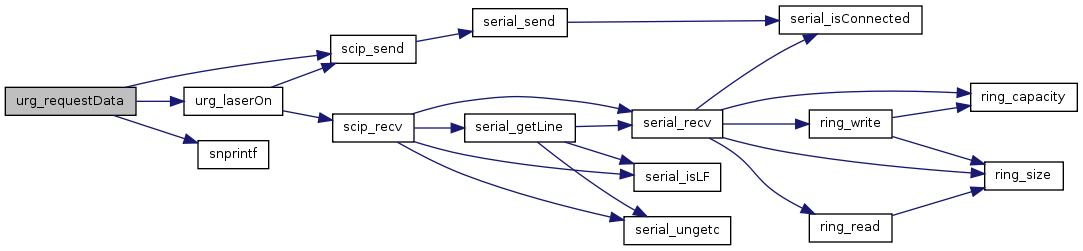
| int | urg_requestData (urg_t *urg, urg_request_type request_type, int first_index, int last_index) |
| Request for distance data. | |
| int | urg_receiveData (urg_t *urg, long data[], int data_max) |
| Receive URG data. | |
| int | urg_receiveDataWithIntensity (urg_t *urg, long data[], int data_max, long intensity[]) |
| Get data with intensity. | |
| int | urg_receivePartialData (urg_t *urg, long data[], int data_max, int first_index, int last_index) |
| Get partial URG data. | |
| long | urg_recentTimestamp (const urg_t *urg) |
| Receive time stamp. | |
| double | urg_index2rad (const urg_t *urg, int index) |
| Change index value into angle (radian). | |
| int | urg_index2deg (const urg_t *urg, int index) |
| Change index into angle(degree). | |
| int | urg_rad2index (const urg_t *urg, double radian) |
| Angle(radian) is converted to index value. | |
| int | urg_deg2index (const urg_t *urg, int degree) |
| Angle(degree) is converted into index. | |
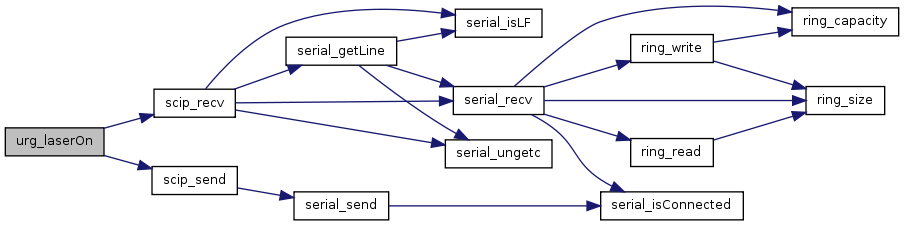
| int | urg_laserOn (urg_t *urg) |
| Directs laser to switch on. | |
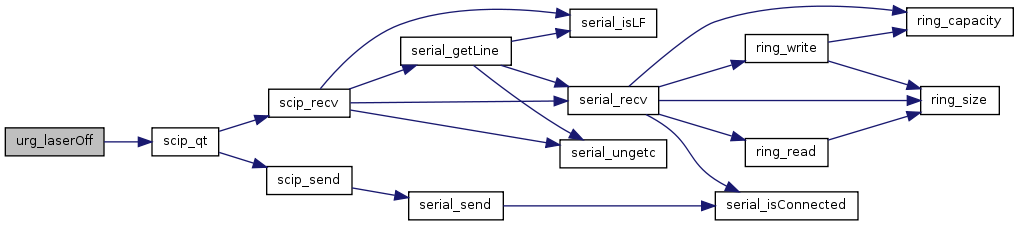
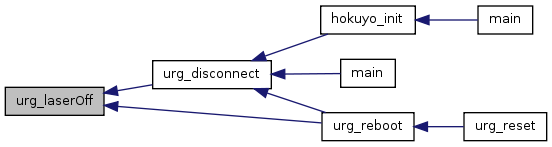
| int | urg_laserOff (urg_t *urg) |
| Directs laser to switch off. | |
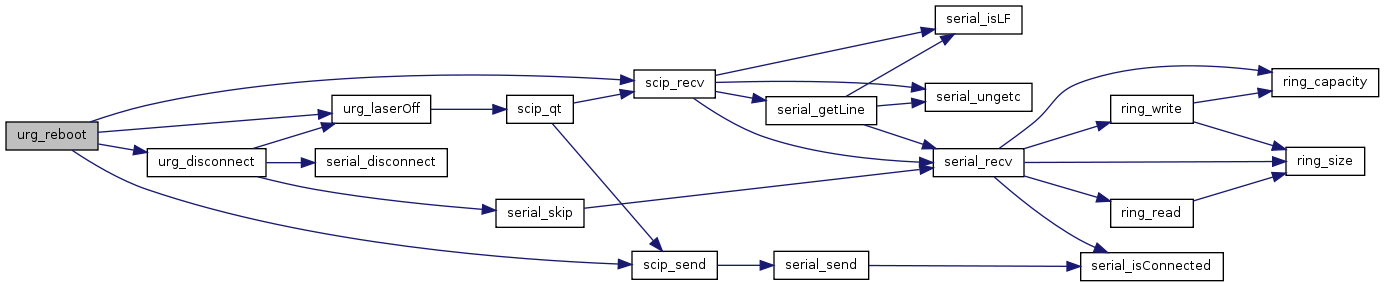
| int | urg_reboot (urg_t *urg) |
| reboot | |
| int | urg_reset (urg_t *urg) |
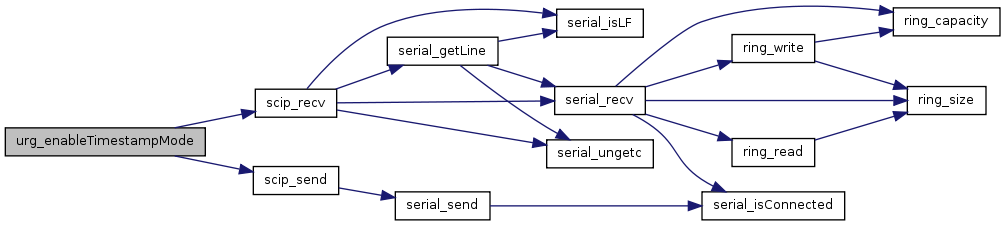
| int | urg_enableTimestampMode (urg_t *urg) |
| Enters into time stamp mode. | |
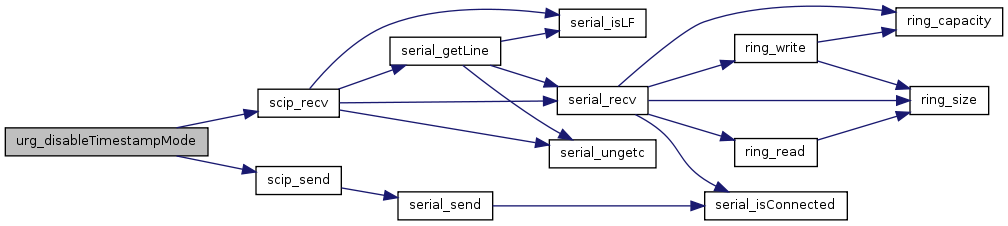
| int | urg_disableTimestampMode (urg_t *urg) |
| Comes out of time stamp mode. | |
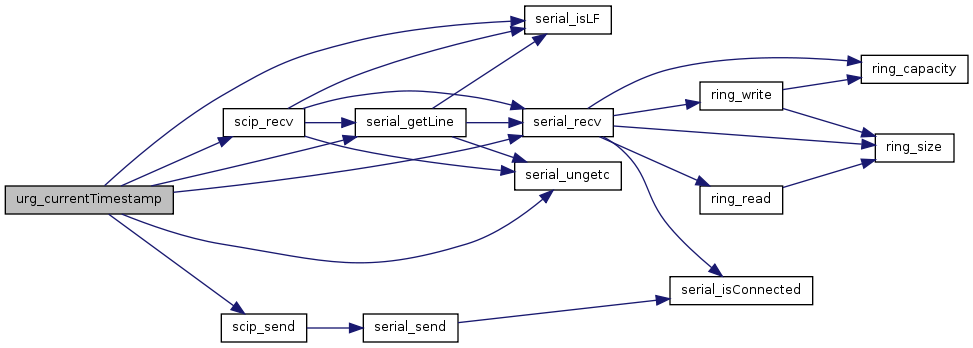
| long | urg_currentTimestamp (urg_t *urg) |
| Get time stamp. | |
Detailed Description
URG control.
- Id:
- urg_ctrl.c 1714 2010-02-21 20:53:28Z satofumi
Enumeration Type Documentation
| anonymous enum |
Function Documentation
| int urg_connect | ( | urg_t * | urg, | |
| const char * | device, | |||
| long | baudrate | |||
| ) |
Connection.
- Parameters:
-
[in,out] urg Structure of URG control [in] device Connection device [in] baudrate Baudrate
- Return values:
-
0 Normal <0 Error
- See also:
- gd_scan.c, md_scan.c
Example
urg_t urg; // Coonnection if (urg_connect(&urg, "COM3", 115200) < 0) { printf("urg_connect: %s\n", urg_error(&urg)); return -1; } ... urg_disconnect(&urg);
- Examples:
- gd_scan.c.
| long urg_currentTimestamp | ( | urg_t * | urg | ) |
Get time stamp.
Returns TM1 response.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
>=0 Timestamp [msec] <0 Error
Example
// Enters into time stamp urg_enableTimestampMode(&urg); // Get URG time stamp continuously. for (i = 0; i < 5; ++i) { long timestamp = urg_currentTimestamp(&urg); printf("timestamp: %ld\n", timestamp) } // leave tiemstamp mode urg_disableTimestampMode(&urg);
| int urg_dataMax | ( | const urg_t * | urg | ) |
Returns the number of maximum data obtained in one scan.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
>=0 number of maximum data obtained in one scan <0 Error
- See also:
- gd_scan.c
Example
enum { BufferSize = 2048 }; long data[BufferSize]; ... // Checks whether number of maximum data obtained by URG sensor does not exceeds receive buffer // (This is not necessary if size of buffer is dynamically allocated.) int data_max = urg_dataMax(&urg); ASSERT(BufferSize >= data_max);
- Examples:
- gd_scan.c.
| int urg_deg2index | ( | const urg_t * | urg, | |
| int | degree | |||
| ) |
Angle(degree) is converted into index.
- Parameters:
-
[in,out] urg Structure of URG control [in] Angle(degre)
- Returns:
- Index value
- See also:
- index_convert.c

| int urg_disableTimestampMode | ( | urg_t * | urg | ) |
Comes out of time stamp mode.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
0 Normal <0 Error
| void urg_disconnect | ( | urg_t * | urg | ) |
Disconnection.
- Parameters:
-
[in,out] urg Structure of URG control
- See also:
- urg_connect()
- gd_scan.c, md_scan.c
- Examples:
- gd_scan.c.
| int urg_enableTimestampMode | ( | urg_t * | urg | ) |
Enters into time stamp mode.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
0 Normal <0 Error
| const char* urg_error | ( | const urg_t * | urg | ) |
Get error message.
- Parameters:
-
[in,out] urg Structure of URG control
- Returns:
- Error message
- See also:
- urg_connect()
- gd_scan.c, md_scan.c
- Examples:
- gd_scan.c.


| int urg_index2deg | ( | const urg_t * | urg, | |
| int | index | |||
| ) |
Change index into angle(degree).
- Parameters:
-
[in,out] urg Structure of URG control [in] index Index value
- Returns:
- Angle [degree]
- See also:
- index_convert.c

| double urg_index2rad | ( | const urg_t * | urg, | |
| int | index | |||
| ) |
Change index value into angle (radian).

Front of the sensor is a positive in X axis
- Parameters:
-
[in,out] urg Structure of URG control [in] index Index value
- Returns:
- angle[radian]
Example
// To operate urg_index2rad(), data from 0 to last_index is stored. // The data of the step not measured becomes -1. urg_requestData(&urg, URG_GD, first_index, last_index); n = urg_receiveData(&urg, data, data_max); for (i = 0; i < n; ++i) { long l = data[i]; if (l > min_distance) { double rad = urg_index2rad(&urg, i); double x = data[i] * cos(rad); double y = data[i] * sin(rad); printf("%f, %f\n", x, y); } }
- See also:
- index_convert.c

| void urg_initialize | ( | urg_t * | urg | ) |

| int urg_isConnected | ( | const urg_t * | urg | ) |
Checks whether connected or not and returns the result.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
0 if connected <0 if disconnected
- See also:
- urg_connect(), urg_disconnect()
Example
if (urg_isConnected(&urg) < 0) { printf("not connected.\n"); } else { printf("connected.\n"); }

| int urg_laserOff | ( | urg_t * | urg | ) |
Directs laser to switch off.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
0 Normal <0 Error
| int urg_laserOn | ( | urg_t * | urg | ) |
Directs laser to switch on.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
0 Normal <0 Error
- See also:
- gd_scan.c

| long urg_maxDistance | ( | const urg_t * | urg | ) |
Maximum measurable distance.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
>=0 Maximum measurable distance [mm] <0 Error
- See also:
- expand_2d.c
Example
... n = urg_receiveData(&urg, data, data_max); min_distance = urg_minDistance(&urg); max_distance = urg_minDistance(&urg); // Output only valid data for (i = 0; i < n; ++i) { long length = data[i]; if ((length > min_distance) && (length < max_distance)) { printf("%d:%d\n", i, length); } }

| long urg_minDistance | ( | const urg_t * | urg | ) |
Minimum measureable distance.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
>=0 Minimum measurable distance [mm] <0 Error
- See also:
- expand_2d.c

| const char* urg_model | ( | const urg_t * | urg | ) |
URG Returns the sensor type.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
URG sensor type
printf("URG type: %s\n", urg_model(&urg));

| int urg_parameters | ( | urg_t * | urg, | |
| urg_parameter_t * | parameters | |||
| ) |
URG Returns parameter.
- Parameters:
-
[in,out] urg Structure of URG control [out] parameters Structure of URG parameter
- Return values:
-
0 Normal <0 Error
Execution example of get_parameters.c (Classic-URG)
% ./get_parameters urg_getParameters: No Error. distance_min: 20 distance_max: 5600 area_total: 1024 area_min: 44 area_max: 725 area_front: 384 scan_rpm: 600 urg_getDistanceMax(): 5600 urg_getDistanceMin(): 20 urg_getScanMsec(): 100 urg_getDataMax(): 726

| int urg_rad2index | ( | const urg_t * | urg, | |
| double | radian | |||
| ) |
Angle(radian) is converted to index value.
Front of the sensor is a positive in X axis
- Parameters:
-
[in,out] urg Structure of URG control [in] Angle(radian)
- Returns:
- Index
- See also:
- index_convert.c

| int urg_reboot | ( | urg_t * | urg | ) |
reboot
- Return values:
-
0 Normal <0 Error
- Attention:
- Only Top-URG (2010-02-04)

| int urg_receiveData | ( | urg_t * | urg, | |
| long | data[], | |||
| int | data_max | |||
| ) |
Receive URG data.
- Parameters:
-
[in,out] urg Structure of URG control [out] data Storage location of received data [in] data_max Maximum number of data that can be received
- Return values:
-
0 > Number of data received <0 Error
- See also:
- urg_requestData()
- Examples:
- gd_scan.c.


| int urg_receiveDataWithIntensity | ( | urg_t * | urg, | |
| long | data[], | |||
| int | data_max, | |||
| long | intensity[] | |||
| ) |
Get data with intensity.
- Parameters:
-
[in,out] urg Structure of URG control [out] data Storage location of received data [in] data_max Maximum number of data that can be received [out] intensity Storage location of intensity of received data.
- Attention:
- Applicable only to Classic-URG (currently 2008-12-24)
| int urg_receivePartialData | ( | urg_t * | urg, | |
| long | data[], | |||
| int | data_max, | |||
| int | first_index, | |||
| int | last_index | |||
| ) |
Get partial URG data.
- Parameters:
-
[in,out] urg Structure of URG control [out] data Storage location of received data [in] data_max Maximum number of data that can be received [in] first_index Index of the first data stored. [in] last_index Index of the last data stored
- Return values:
-
0 > Number of data received <0 Error
- See also:
- gd_scan.c, md_scan.c
| long urg_recentTimestamp | ( | const urg_t * | urg | ) |
Receive time stamp.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
Time stamp [msec]
- See also:
- md_scan.c
Example
urg_requestData(&urg, URG_GD, URG_FIRST, URG_LAST); n = urg_receiveData(&urg, data, data_max); if (n > 0) { long timestamp = urg_recentTimestamp(&urg); printf("timestamp: %d\n", timestamp); // Display data etc // !!! }
- Examples:
- gd_scan.c.

| int urg_remainCaptureTimes | ( | const urg_t * | urg | ) |
Get number of remaining times on MD/MS capture.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
remaining times. (100 means infinity times)
- See also:
- md_scan.c
| int urg_requestData | ( | urg_t * | urg, | |
| urg_request_type | request_type, | |||
| int | first_index, | |||
| int | last_index | |||
| ) |
Request for distance data.
Request for distance data of [first_index, last_index]. Return all scan data when specified URG_FIRST, URG_LAST.
- Parameters:
-
[in,out] urg Structure of URG control [in] request_type Received data type. [in] first_index Index of the first data stored [in] last_index Index of the last received data stored.
- Return values:
-
0 Normal <0 Error
- See also:
- urg_receiveData()
- gd_scan.c, md_scan.c
Example
// Get one scan data from GD command urg_requestData(&urg, URG_GD, URG_FIRST, URG_LAST); n = urg_receiveData(&urg, data, data_max); // Get data continuously from MD scan urg_requestData(&urg, URG_MD, URG_FIRST, URG_LAST); while (1) { n = urg_receiveData(&urg, data, data_max); if (n > 0) { // Display data etc ... } }
- Examples:
- gd_scan.c.

| int urg_reset | ( | urg_t * | urg | ) |

| int urg_scanMsec | ( | const urg_t * | urg | ) |
Returns measurement time taken for one scan.
Returns measurement time when motor speed is 100% as specified.
- Parameters:
-
[in,out] urg Structure of URG control
- Return values:
-
>=0 measurement time taken for one scan [msec] <0 Error
- See also:
- urg_setMotorSpeed()
- md_scan.c
| int urg_setCaptureTimes | ( | urg_t * | urg, | |
| int | times | |||
| ) |
Sets number of times the data to be acquired .
- Parameters:
-
[in,out] urg Structure of URG control [in] times Number of scan data
- Return values:
-
0 Normal <0 Error
- Attention:
- Valid only with MD/MS command
- Specify UrgInfinityTimes to acquire data more than 100 times
Example
// Data is supplied indefinitely urg_setCaptureTimes(&urg, UrgInfinityTimes); ... // Data acquistion is stopped if laser is switched off. urg_laserOff(&urg);

| int urg_setSkipFrames | ( | urg_t * | urg, | |
| int | frames | |||
| ) |
Sets number of scans to be skipped.
- Parameters:
-
[in,out] urg Structure of URG control [in] frames Number of skipped frames.
- Return values:
-
0 Normal <0 Error
- Attention:
- Valid only with MD/MS command.
| int urg_setSkipLines | ( | urg_t * | urg, | |
| int | lines | |||
| ) |
Sets the number of lines to be skiped.
The volume of acquire data can be reduced by skipping the lines .
- Parameters:
-
[in,out] urg Structure of URG control [in] lines Number of lines to be skiped.
- Return values:
-
0 Normal <0 Error
| int urg_versionLines | ( | urg_t * | urg, | |
| char * | lines[], | |||
| int | lines_max | |||
| ) |
Get string containing version information.
- Parameters:
-
[in,out] urg Structure of URG control [out] lines Buffer having version information [in] lines_max Maximum lines in buffer
- Return values:
-
0 Normal <0 Error
- Attention:
- The length of a line in the buffer should be equal to more than # UrgLineWidth[byte].
- See also:
- get_version_lines.c