Process SKIP commands. More...
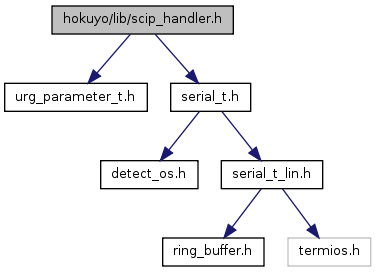
#include "urg_parameter_t.h"#include "serial_t.h"
Include dependency graph for scip_handler.h:
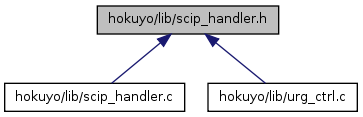
This graph shows which files directly or indirectly include this file:
Enumerations | |
| enum | { ScipNoWaitReply = 0, ScipWaitReply = 1, ScipLineWidth = 64 + 1 + 1 } |
Functions | |
| int | scip_send (serial_t *serial, const char *send_command) |
| Send command. | |
| int | scip_recv (serial_t *serial, const char *command_first, int *return_code, int expected_ret[], int timeout) |
| Receive command response. | |
| int | scip_scip20 (serial_t *serial) |
| Transit to SCIP2.0 mode. | |
| int | scip_qt (serial_t *serial, int *return_code, int wait_reply) |
| Stop measurement and turn off the laser. | |
| int | scip_pp (serial_t *serial, urg_parameter_t *parameters) |
| Get Parameter information. | |
| int | scip_vv (serial_t *serial, char *lines[], int lines_max) |
| Get version information. | |
| int | scip_ss (serial_t *serial, long baudrate) |
| Change baudrate. | |
Detailed Description
Process SKIP commands.
- Id:
- scip_handler.h 1714 2010-02-21 20:53:28Z satofumi
Enumeration Type Documentation
| anonymous enum |
Function Documentation
| int scip_pp | ( | serial_t * | serial, | |
| urg_parameter_t * | parameters | |||
| ) |
Get Parameter information.
- Parameters:
-
[in,out] serial Structure of serial control [out] parameters urg_parameter_t Structure member
- Return values:
-
0 Normal < 0 Error
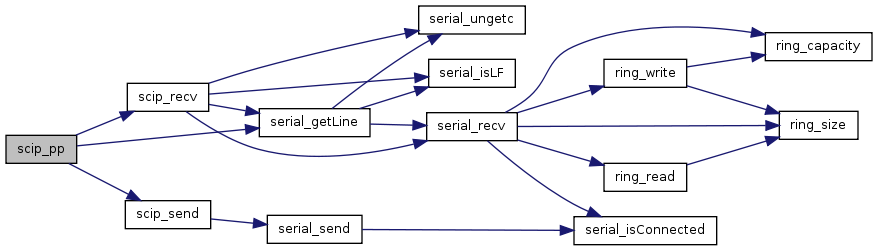
Here is the call graph for this function:
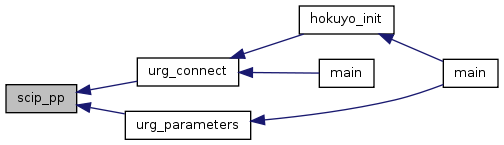
Here is the caller graph for this function:
| int scip_qt | ( | serial_t * | serial, | |
| int * | return_code, | |||
| int | wait_reply | |||
| ) |
Stop measurement and turn off the laser.
If the purpose is to stop MD, then send QT command without waiting for the response from MD command. Process the response of QT in urg_receiveData()
- Parameters:
-
[in,out] serial Structure of serial control [in] return_code Response from QT command [in] wait_reply ScipNoWaitReply when response is not waited. ScipWaitReply when response is waited.
- Return values:
-
0 Normal < 0 Error
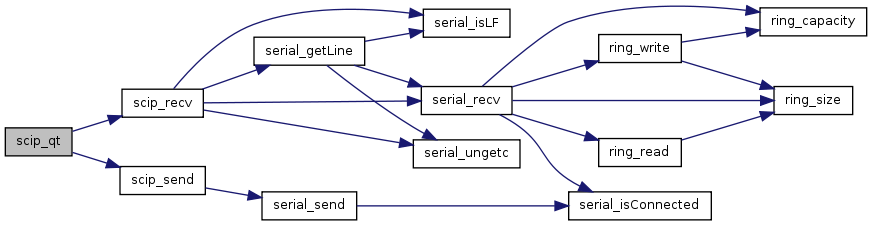
Here is the call graph for this function:
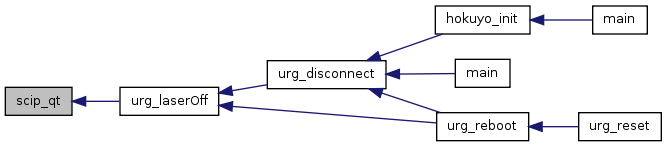
Here is the caller graph for this function:
| int scip_recv | ( | serial_t * | serial, | |
| const char * | command_first, | |||
| int * | return_code, | |||
| int | expected_ret[], | |||
| int | timeout | |||
| ) |
Receive command response.
Store the response of the command if "ret" value is zero.
When the command response is included in expected_ret, the return value of this function becomes 0 (normality).
- Parameters:
-
[out] serial Structure of serial control [out] return_code Return value [in] expected_ret Return value considered to be normal [in] timeout Time out [msec]
- Return values:
-
0 Normal < 0 Error
Receive command response.
- Todo:
- Test the checksum
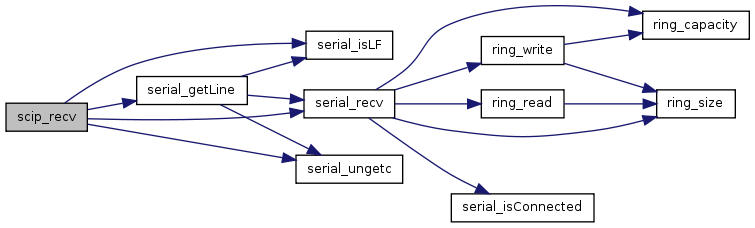
Here is the call graph for this function:
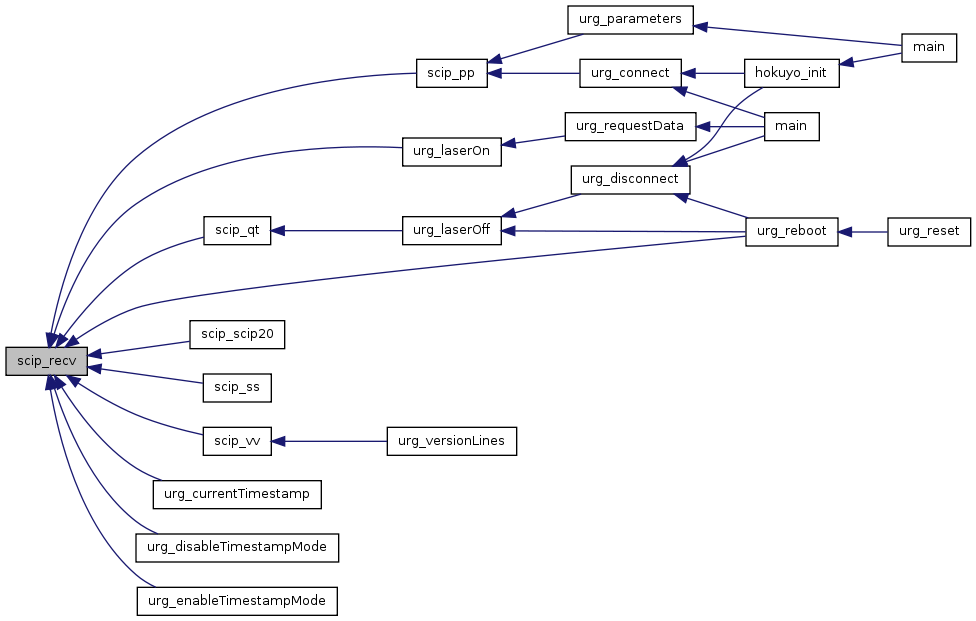
Here is the caller graph for this function:
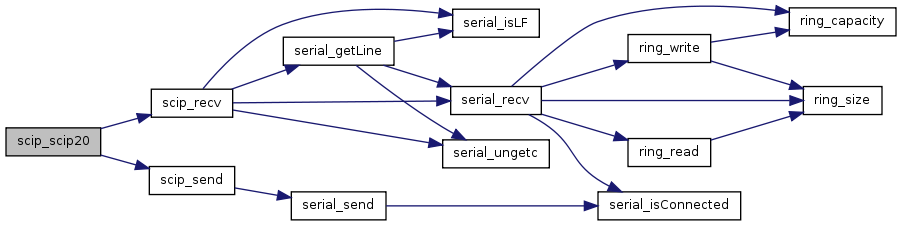
| int scip_scip20 | ( | serial_t * | serial | ) |
Transit to SCIP2.0 mode.
Return 0(Normal) when changed to SCIP2.0 mode
- Parameters:
-
[in,out] serial Structure of serial control
- Return values:
-
0 Normal < 0 Error
Here is the call graph for this function:
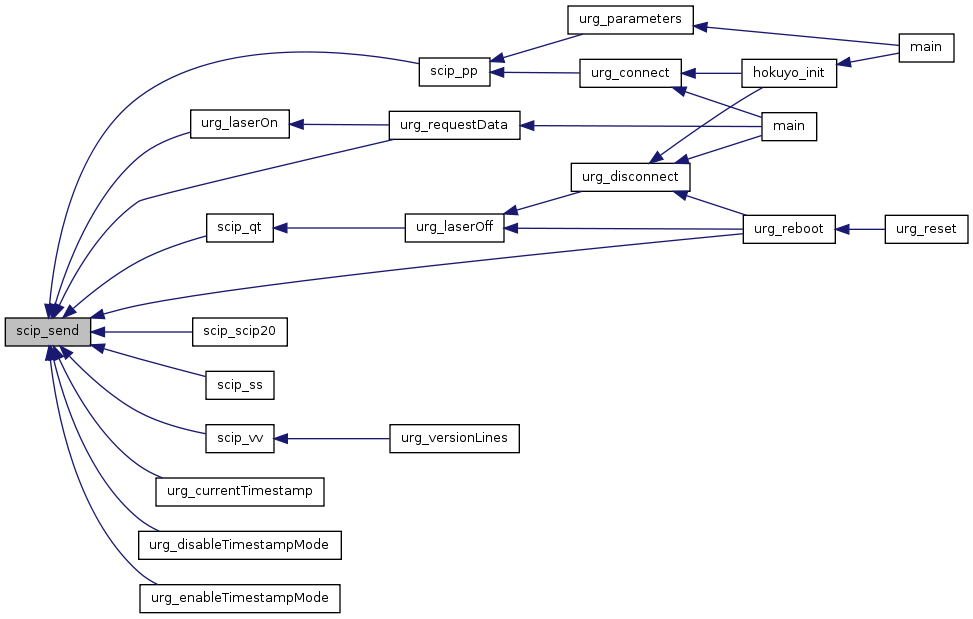
| int scip_send | ( | serial_t * | serial, | |
| const char * | send_command | |||
| ) |
Send command.
- Parameters:
-
[out] serial Structure of serial control [in] send_command Command to be sent
- Return values:
-
0 Normal < 0 Error
Here is the call graph for this function:

Here is the caller graph for this function:
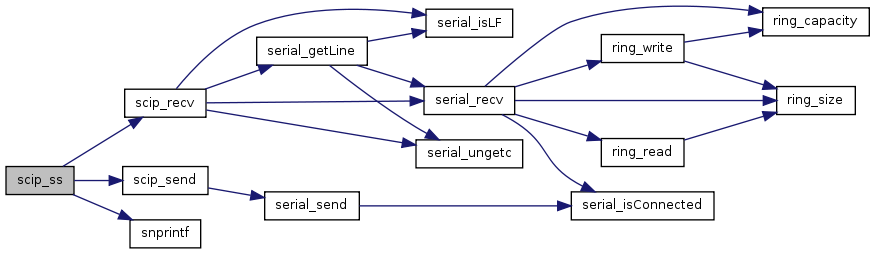
| int scip_ss | ( | serial_t * | serial, | |
| long | baudrate | |||
| ) |
Change baudrate.
- Parameters:
-
[in,out] serial Structure of serial control [in] baudrate Baudrate
- Return values:
-
0 Normal < 0 Error
Here is the call graph for this function:
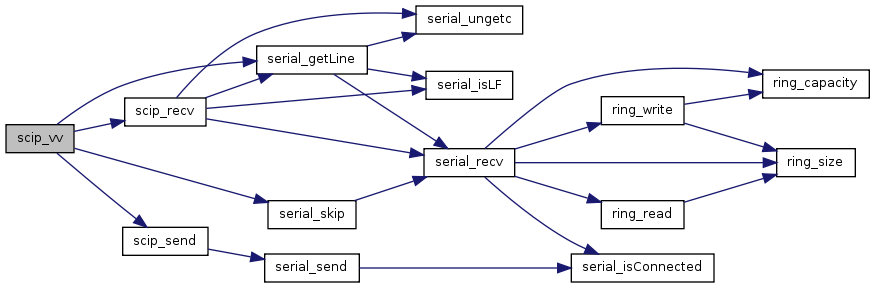
| int scip_vv | ( | serial_t * | serial, | |
| char * | lines[], | |||
| int | lines_max | |||
| ) |
Get version information.
- Parameters:
-
[in,out] serial Structure of serial control [out] lines Storage location of characters containing version information. [in] lines_max Maximum number of character string
- Return values:
-
0 Normal < 0 Error
Here is the call graph for this function:
Here is the caller graph for this function:

