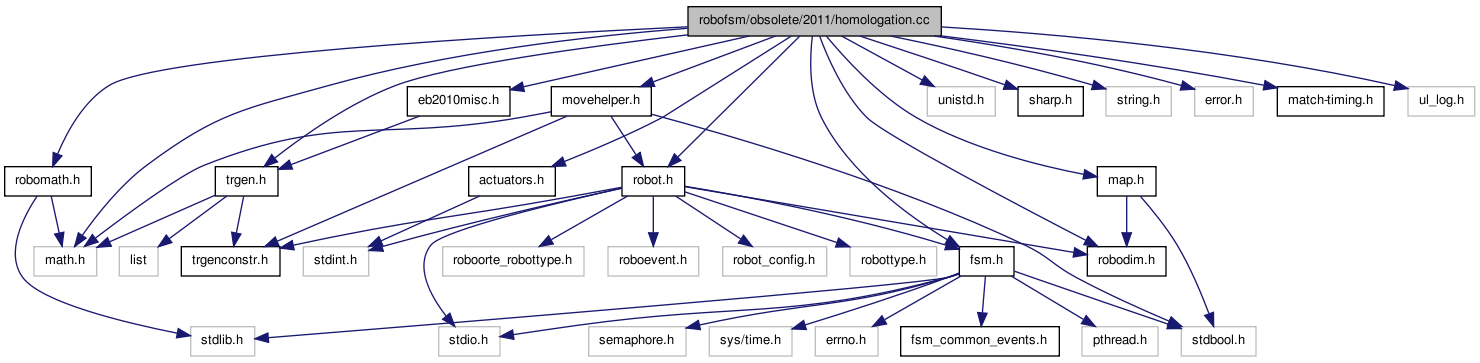
#include <robot.h>#include <fsm.h>#include <unistd.h>#include <math.h>#include <movehelper.h>#include <map.h>#include <sharp.h>#include <robomath.h>#include <string.h>#include <robodim.h>#include <error.h>#include "actuators.h"#include <trgen.h>#include "match-timing.h"#include "eb2010misc.h"#include <ul_log.h>
Include dependency graph for homologation.cc:
Defines | |
| #define | FSM_MAIN |
Functions | |
| UL_LOG_CUST (ulogd_homologation) | |
| FSM_STATE_DECL (init) | |
| FSM_STATE_DECL (wait_for_start) | |
| FSM_STATE_DECL (aproach_first_figure) | |
| FSM_STATE_DECL (load_first_figure) | |
| FSM_STATE_DECL (go_out_first_figure) | |
| FSM_STATE_DECL (place_first_figure) | |
| FSM_STATE_DECL (leave_first_figure) | |
| FSM_STATE_DECL (load_second_figure) | |
| FSM_STATE_DECL (go_out_second_figure) | |
| FSM_STATE_DECL (place_second_figure) | |
| FSM_STATE_DECL (leave_second_figure) | |
| FSM_STATE_DECL (aproach_third_figure) | |
| FSM_STATE_DECL (next_state) | |
| FSM_STATE_DECL (last_state) | |
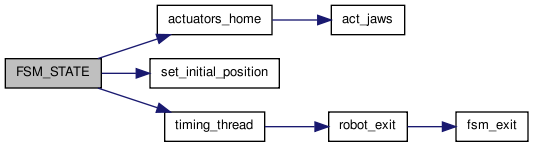
| FSM_STATE (init) | |
| void | set_initial_position () |
| void | actuators_home () |
| FSM_STATE (wait_for_start) | |
| FSM_STATE (aproach_first_figure) | |
| FSM_STATE (load_first_figure) | |
| FSM_STATE (go_out_first_figure) | |
| FSM_STATE (place_first_figure) | |
| FSM_STATE (leave_first_figure) | |
| FSM_STATE (load_second_figure) | |
| FSM_STATE (go_out_second_figure) | |
| FSM_STATE (place_second_figure) | |
| FSM_STATE (leave_second_figure) | |
| FSM_STATE (aproach_third_figure) | |
| FSM_STATE (next_state) | |
| FSM_STATE (last_state) | |
| int | main () |
Variables | |
| struct TrajectoryConstraints tcFast tcSlow | tcVerySlow |
Define Documentation
| #define FSM_MAIN |
Function Documentation
| void actuators_home | ( | ) |
Here is the call graph for this function:

| FSM_STATE | ( | init | ) |
| FSM_STATE | ( | last_state | ) |
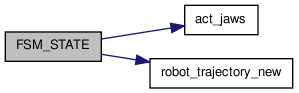
Here is the call graph for this function:

| FSM_STATE | ( | wait_for_start | ) |
Here is the call graph for this function:
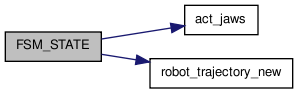
| FSM_STATE | ( | aproach_first_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | load_first_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | place_second_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | go_out_first_figure | ) |
Here is the call graph for this function:

| FSM_STATE | ( | place_first_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | leave_first_figure | ) |
Here is the call graph for this function:

| FSM_STATE | ( | load_second_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | go_out_second_figure | ) |
Here is the call graph for this function:

| FSM_STATE | ( | leave_second_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | aproach_third_figure | ) |
Here is the call graph for this function:
| FSM_STATE | ( | next_state | ) |
Here is the call graph for this function:

| FSM_STATE_DECL | ( | load_second_figure | ) |
| FSM_STATE_DECL | ( | go_out_first_figure | ) |
| FSM_STATE_DECL | ( | leave_first_figure | ) |
| FSM_STATE_DECL | ( | load_first_figure | ) |
| FSM_STATE_DECL | ( | place_second_figure | ) |
| FSM_STATE_DECL | ( | leave_second_figure | ) |
| FSM_STATE_DECL | ( | wait_for_start | ) |
| FSM_STATE_DECL | ( | next_state | ) |
| FSM_STATE_DECL | ( | last_state | ) |
| FSM_STATE_DECL | ( | init | ) |
| FSM_STATE_DECL | ( | aproach_third_figure | ) |
| FSM_STATE_DECL | ( | go_out_second_figure | ) |
| FSM_STATE_DECL | ( | place_first_figure | ) |
| FSM_STATE_DECL | ( | aproach_first_figure | ) |
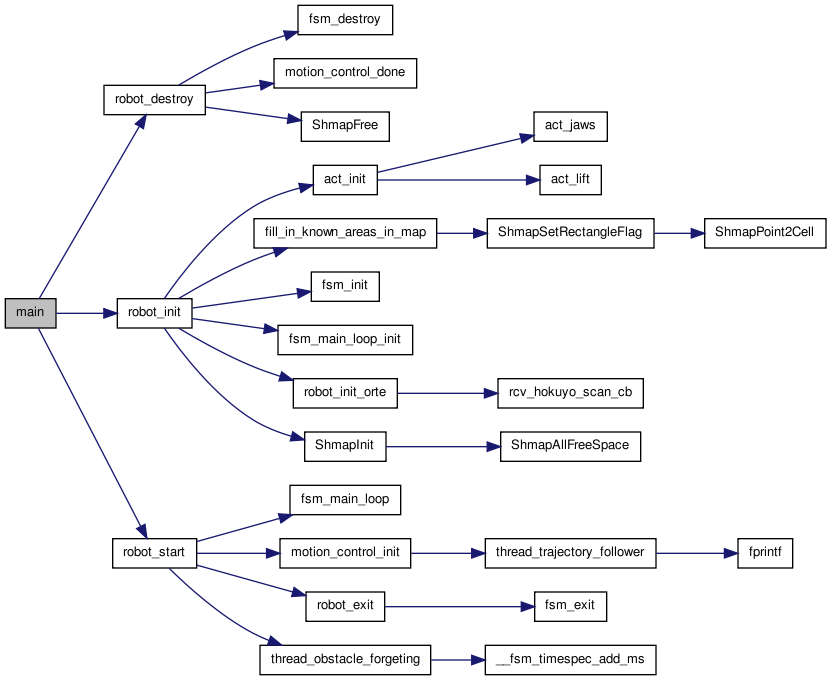
| int main | ( | void | ) |
Here is the call graph for this function:
| void set_initial_position | ( | ) |
| UL_LOG_CUST | ( | ulogd_homologation | ) |
Variable Documentation
| struct TrajectoryConstraints tcFast tcSlow tcVerySlow |
