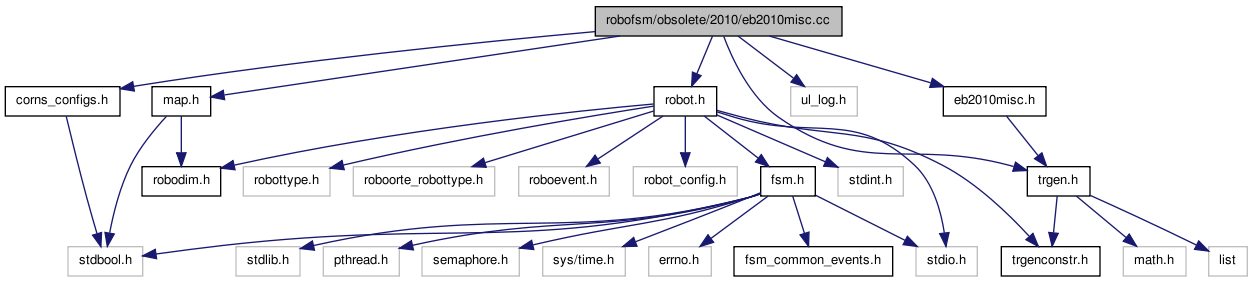
#include <map.h>#include <trgen.h>#include "robot.h"#include "corns_configs.h"#include <ul_log.h>#include "eb2010misc.h"
Include dependency graph for eb2010misc.cc:
Functions | |
| UL_LOG_CUST (ulogd_eb2010misc) | |
| double | x_coord (double x, enum which_side which_side) |
| struct corn * | choose_next_corn () |
| double | get_point_to_line_distance (const Point &p, const Point &lp1, const Point &lp2) |
| Computes and returns line to point distance. | |
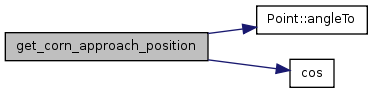
| Pos * | get_corn_approach_position (struct corn *corn) |
| void | remove_wall_around_corn (const double x, const double y) |
Function Documentation
| struct corn* choose_next_corn | ( | ) | [read] |
Here is the call graph for this function:

Computes and returns line to point distance.
- Parameters:
-
[in] p the point coords [in] lp1 coords of one of the points on the line [in] lp2 coords of the second point on the line
| void remove_wall_around_corn | ( | const double | x, | |
| const double | y | |||
| ) |
Here is the call graph for this function:

| UL_LOG_CUST | ( | ulogd_eb2010misc | ) |
| double x_coord | ( | double | x, | |
| enum which_side which_side | ||||
| ) |
Here is the call graph for this function:

