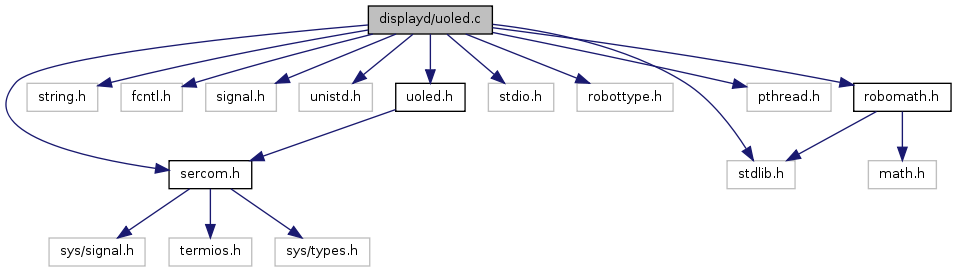
#include <sercom.h>#include <string.h>#include <fcntl.h>#include <signal.h>#include <unistd.h>#include <stdlib.h>#include <stdio.h>#include <robottype.h>#include "uoled.h"#include <pthread.h>#include <robomath.h>
Include dependency graph for uoled.c:
Functions | |
| struct sercom_data * | uoled_sercom_init (char *tty, void(*sighandler)(int)) |
| Initializes and opens serial port (sercom). | |
| void | uoled_sercom_close () |
| Close serial port (sercom). | |
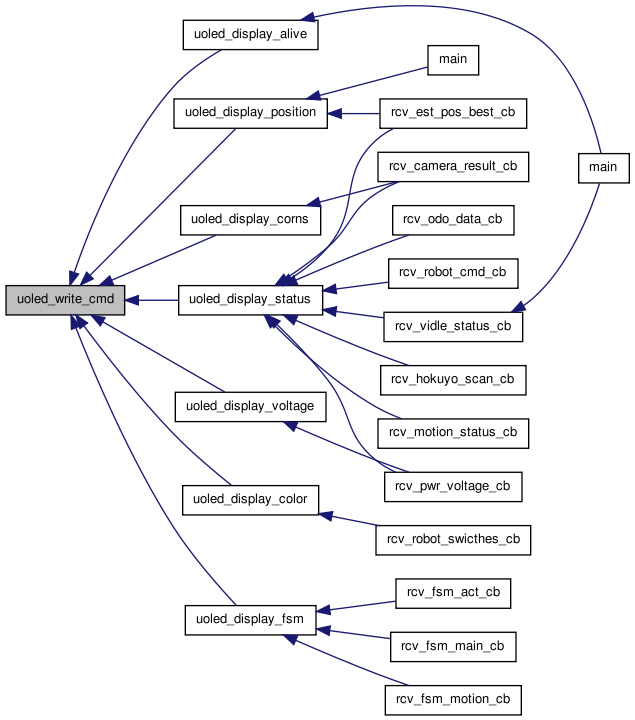
| int | uoled_write_cmd (uint8_t *buff, int size) |
| int | uoled_read_cmd (uint8_t *buff, int size) |
| Read data from serial port (sercom). | |
| int | uoled_recieve_cmd (UDE_recieve_cmd_t *cmd) |
| Read command from serial port. | |
| int | uoled_display_status (UDE_component_t c, UDE_hw_status_t s) |
| Send the actual state of components to display. | |
| int | uoled_display_fsm (UDE_fsm_t fsm, char *state) |
| Send the actual state of FSM to display. | |
| int | uoled_display_alive () |
| Used to refresh display indication that comunication is ok. | |
| int | uoled_display_color (int color) |
| int | uoled_display_voltage (double voltage33, double voltage50, double voltage80, double voltageBAT) |
| Used to refresh voltage readings on the display. | |
| int | uoled_display_position (double x, double y, double phi) |
| Used to refresh actual position on the display. | |
| int | uoled_display_corns (int side, int center) |
Function Documentation
| int uoled_display_color | ( | int | color | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int uoled_display_corns | ( | int | side, | |
| int | center | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int uoled_write_cmd | ( | uint8_t * | buff, | |
| int | size | |||
| ) |
Here is the caller graph for this function: