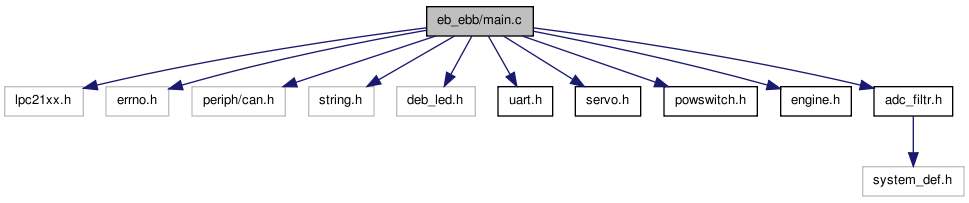
#include <lpc21xx.h>#include <errno.h>#include <periph/can.h>#include <string.h>#include <deb_led.h>#include "uart.h"#include "servo.h"#include "powswitch.h"#include "engine.h"#include "adc_filtr.h"
Include dependency graph for main.c:
Defines | |
| #define | CAN_SPEED 1000000 |
| CAN speed. | |
| #define | CAN_SERVO 0x32 |
| CAN ID for servo message. | |
| #define | SPEED 30 |
| Motor speed. | |
| #define | CAN_ISR 0 |
| Variables ISR values. | |
| #define | ENG_ISR 1 |
| Variables ISR values. | |
| #define | ADC_ISR 3 |
| Variables ISR values. | |
| #define | SERVO_ISR 5 |
| Variables ISR values. | |
Functions | |
| void | dummy_wait (void) |
| Dummy wait (busy wait) This function shoul be removed in future. | |
| void | can_rx (can_msg_t *msg) |
| This function is called when we recieve CAN message. | |
| void | init_perip (void) |
| Inicializes pepherials used in ebb library - sample use. | |
| int | main (void) |
| Main function contains a small sample how to use ebb library. | |
Define Documentation
| #define ADC_ISR 3 |
Variables ISR values.
| #define CAN_ISR 0 |
Variables ISR values.
| #define CAN_SERVO 0x32 |
CAN ID for servo message.
| #define CAN_SPEED 1000000 |
CAN speed.
| #define ENG_ISR 1 |
Variables ISR values.
| #define SERVO_ISR 5 |
Variables ISR values.
| #define SPEED 30 |
Motor speed.
Function Documentation
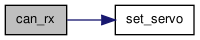
| void can_rx | ( | can_msg_t * | msg | ) |
This function is called when we recieve CAN message.
Its called from CAN ISR
- Parameters:
-
*msg structure of can message (can_msg_t)
Here is the call graph for this function:
| void dummy_wait | ( | void | ) |
Dummy wait (busy wait) This function shoul be removed in future.
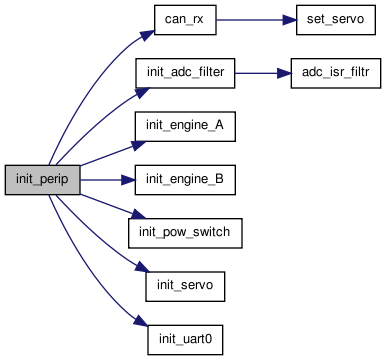
| void init_perip | ( | void | ) |
Inicializes pepherials used in ebb library - sample use.
Here is the call graph for this function:
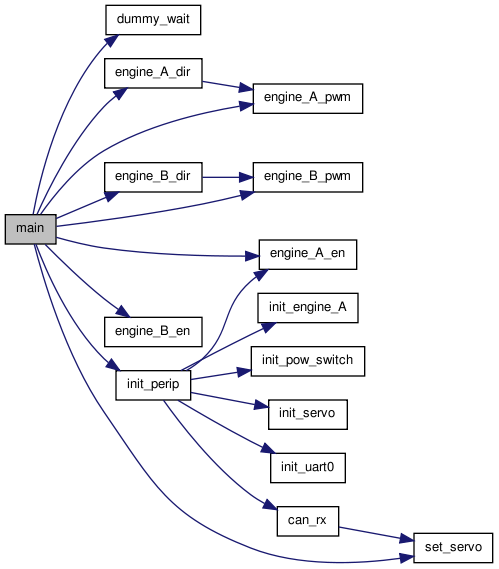
| int main | ( | void | ) |
Main function contains a small sample how to use ebb library.
Here is the call graph for this function: