CAN-ORTE bridge. More...
#include <cstring>#include <iostream>#include <cstdlib>#include <sys/socket.h>#include <sys/ioctl.h>#include <fcntl.h>#include <poll.h>#include <af_can.h>#include <canutils.h>#include <can_ids.h>#include <can_msg_masks.h>#include <can_msg_def.h>#include <sharp.h>#include <orte.h>#include <roboorte_robottype.h>#include "cand.h"
Include dependency graph for cand.cc:

Functions | |
| int | cand_init () |
| int | set_pwr_ctrl (struct robottype_orte_data *orte_data) |
| int | send_can_msg (struct robottype_orte_data *orte_data) |
| int | set_motor_speed (struct robottype_orte_data *orte_data) |
| int | set_jaws_cmd (struct robottype_orte_data *orte_data) |
| int | set_lift_cmd (struct robottype_orte_data *orte_data) |
| int | can_send (canid_t id, unsigned char length, unsigned char *data) |
| void | cand_parse_frame (struct robottype_orte_data *orte, struct can_frame frame) |
| Parse frame ID and react as required. | |
| void | rcv_pwr_ctrl_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_can_msg_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_motion_speed_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_jaws_cmd_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_lift_cmd_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| int | main (int argc, char *argv[]) |
Detailed Description
CAN-ORTE bridge.
- Date:
- 08/04/08
Copyright: (c) 2008 CTU Dragons CTU FEE - Department of Control Engineering License: GNU GPL v.2
Function Documentation
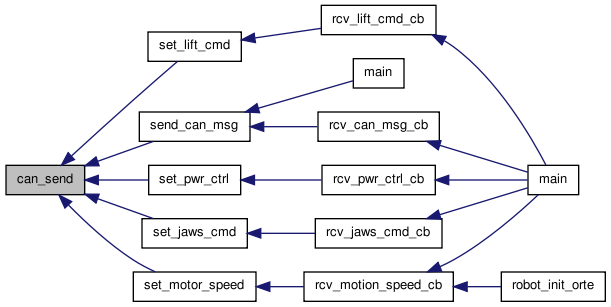
| int can_send | ( | canid_t | id, | |
| unsigned char | length, | |||
| unsigned char * | data | |||
| ) |
Here is the caller graph for this function:
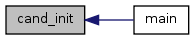
| int cand_init | ( | ) |
Here is the caller graph for this function:
| void cand_parse_frame | ( | struct robottype_orte_data * | orte, | |
| struct can_frame | frame | |||
| ) |
Parse frame ID and react as required.
Here is the caller graph for this function:

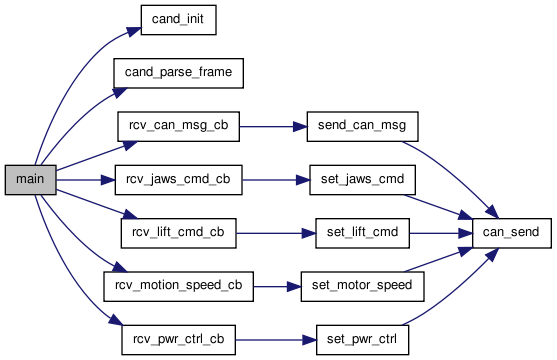
| int main | ( | int | argc, | |
| char * | argv[] | |||
| ) |
Here is the call graph for this function:
| void rcv_can_msg_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void rcv_jaws_cmd_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void rcv_lift_cmd_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

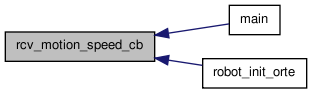
| void rcv_motion_speed_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:
| void rcv_pwr_ctrl_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int send_can_msg | ( | struct robottype_orte_data * | orte_data | ) |
Here is the call graph for this function:

Here is the caller graph for this function:
| int set_jaws_cmd | ( | struct robottype_orte_data * | orte_data | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int set_lift_cmd | ( | struct robottype_orte_data * | orte_data | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int set_motor_speed | ( | struct robottype_orte_data * | orte_data | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| int set_pwr_ctrl | ( | struct robottype_orte_data * | orte_data | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

