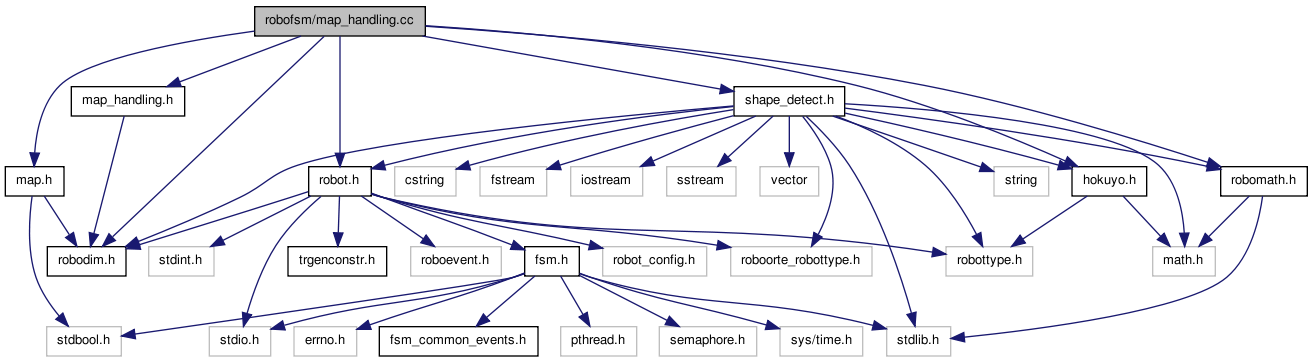
#include <robot.h>#include <robodim.h>#include <map.h>#include <robomath.h>#include <hokuyo.h>#include <shape_detect.h>#include "map_handling.h"
Include dependency graph for map_handling.cc:
Defines | |
| #define | OBS_SIZE_M 0.2 |
| Expected size of detected obstacle. | |
| #define | IGNORE_CLOSER_THAN_M 0.2 |
| Do not mark any obstacle closer than this to center of the robot (avoid path planning deadlock). | |
| #define | IGNORE_FURTHER_THAN_M 0.5 |
| Ignore data from sharp if further than this. | |
| #define | OBS_FORGET_PERIOD 100 |
| The period of thread_obstacle_forgeting [ms]. | |
| #define | OBS_FORGET_SEC 1 |
| Time to completely forget detected obstacle. | |
| #define | OBS_OFFSET 0.6 |
Functions | |
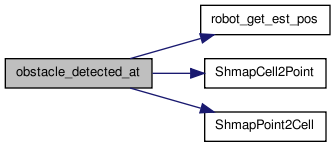
| void | obstacle_detected_at (double x, double y, bool real_obstacle) |
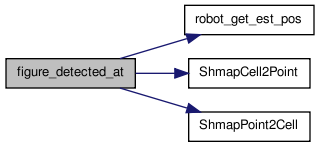
| void | figure_detected_at (double x, double y, const bool state) |
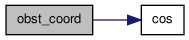
| void | obst_coord (struct robot_pos_type *e, const struct sharp_pos *s, double v, double *x, double *y) |
| A thread running the trajectory recalc. | |
| void | get_checkerboard (std::vector< Shape_detect::Point > &team) |
| float | point_distance (Shape_detect::Point a, Shape_detect::Point b) |
| void | update_map_hokuyo (struct hokuyo_scan_type *s) |
| void * | thread_obstacle_forgeting (void *arg) |
| A thread updating the map. | |
Define Documentation
| #define IGNORE_CLOSER_THAN_M 0.2 |
Do not mark any obstacle closer than this to center of the robot (avoid path planning deadlock).
| #define IGNORE_FURTHER_THAN_M 0.5 |
Ignore data from sharp if further than this.
| #define OBS_FORGET_PERIOD 100 |
The period of thread_obstacle_forgeting [ms].
| #define OBS_FORGET_SEC 1 |
Time to completely forget detected obstacle.
| #define OBS_OFFSET 0.6 |
| #define OBS_SIZE_M 0.2 |
Expected size of detected obstacle.
Function Documentation
| void figure_detected_at | ( | double | x, | |
| double | y, | |||
| const bool | state | |||
| ) |
Here is the call graph for this function:
| void get_checkerboard | ( | std::vector< Shape_detect::Point > & | team | ) |
Here is the caller graph for this function:

| void obst_coord | ( | struct robot_pos_type * | e, | |
| const struct sharp_pos * | s, | |||
| double | v, | |||
| double * | x, | |||
| double * | y | |||
| ) |
A thread running the trajectory recalc.
This (low-medium priority) thread updates the map with sensors information. If it is necesary, it recalculate the path.
- Parameters:
-
arg
- Returns:
Here is the call graph for this function:
Here is the caller graph for this function:

| void obstacle_detected_at | ( | double | x, | |
| double | y, | |||
| bool | real_obstacle | |||
| ) |
Then all the cells arround obstacle cell are set as MAP_NEW_OBSTACLE. Cells of current robot position are not set to avoid path planning deadlock. If there are a path cell between them, the path will be recalculated.
- See also:
- OBS_CSPACE.
Here is the call graph for this function:
Here is the caller graph for this function:

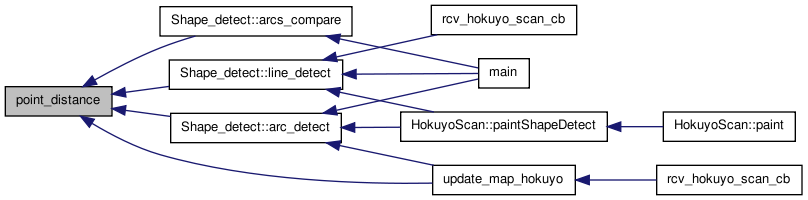
| float point_distance | ( | Shape_detect::Point | a, | |
| Shape_detect::Point | b | |||
| ) | [inline] |
Here is the caller graph for this function:
| void* thread_obstacle_forgeting | ( | void * | arg | ) |
A thread updating the map.
Here is the call graph for this function:

Here is the caller graph for this function:

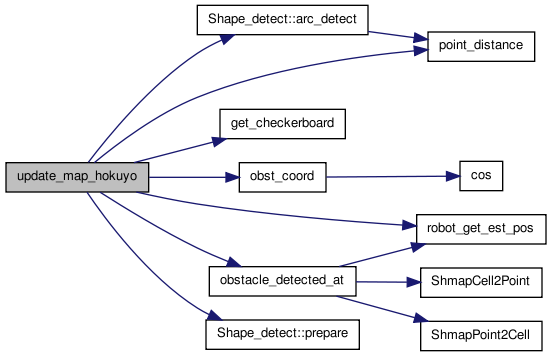
| void update_map_hokuyo | ( | struct hokuyo_scan_type * | s | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

