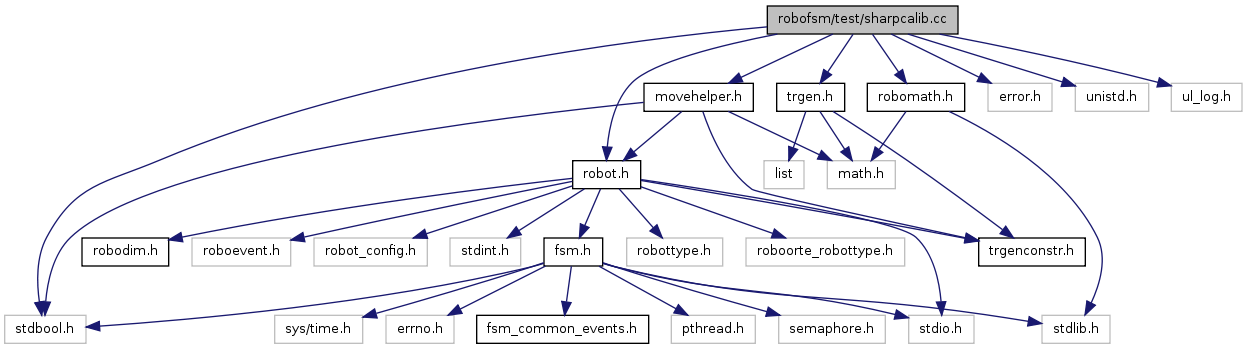
#include <robot.h>#include <movehelper.h>#include <trgen.h>#include <robomath.h>#include <error.h>#include <unistd.h>#include <stdbool.h>#include <ul_log.h>
Include dependency graph for sharpcalib.cc:
Defines | |
| #define | FSM_MAIN |
| #define | MEASUREMENTS_PER_DISTANCE 10 |
| #define | MIN_DISTANCE 4 |
| #define | MAX_DISTANCE 30 |
| #define | STEP 1 |
| #define | NUMBER_OF_DISTANCES ((MAX_DISTANCE - MIN_DISTANCE)/STEP + 1) |
| #define | NUMBER_OF_MEASUREMENTS (NUMBER_OF_DISTANCES * MEASUREMENTS_PER_DISTANCE) |
| #define | TIMEOUT 100 |
| #define | VARIABLE_NAME puck_distance |
Functions | |
| UL_LOG_CUST (ulogd_sharpcalib) | |
| int | distance (int distance_i) |
| int | measurement_index (int distance_i, int measurement_i) |
| void rcv_ void *recvCallBackParam | switch (info->status) |
| void | take_the_measurement () |
| FSM_STATE_DECL (measure) | |
| FSM_STATE_DECL (move) | |
| FSM_STATE (init) | |
| FSM_STATE (move) | |
| FSM_STATE (measure) | |
| int | main () |
Variables | |
| int | distances [NUMBER_OF_DISTANCES] |
| int | measurements [NUMBER_OF_MEASUREMENTS] |
| int | distance_i |
| int | measurement_i |
| bool | measure |
Define Documentation
| #define FSM_MAIN |
| #define MAX_DISTANCE 30 |
| #define MEASUREMENTS_PER_DISTANCE 10 |
| #define MIN_DISTANCE 4 |
| #define NUMBER_OF_DISTANCES ((MAX_DISTANCE - MIN_DISTANCE)/STEP + 1) |
| #define NUMBER_OF_MEASUREMENTS (NUMBER_OF_DISTANCES * MEASUREMENTS_PER_DISTANCE) |
| #define STEP 1 |
| #define TIMEOUT 100 |
| #define VARIABLE_NAME puck_distance |
Function Documentation
| int distance | ( | int | distance_i | ) |
| FSM_STATE | ( | init | ) |
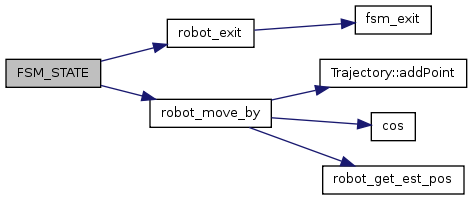
| FSM_STATE | ( | move | ) |
Here is the call graph for this function:
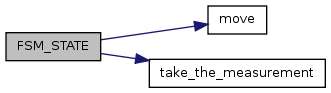
| FSM_STATE | ( | measure | ) |
Here is the call graph for this function:
| FSM_STATE_DECL | ( | measure | ) |
| FSM_STATE_DECL | ( | move | ) |
| int main | ( | void | ) |
Here is the call graph for this function:

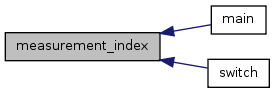
| int measurement_index | ( | int | distance_i, | |
| int | measurement_i | |||
| ) |
Here is the caller graph for this function:
| void rcv_ void* recvCallBackParam switch | ( | info-> | status | ) |
Here is the call graph for this function:

| void take_the_measurement | ( | ) |
Here is the caller graph for this function:

| UL_LOG_CUST | ( | ulogd_sharpcalib | ) |
Variable Documentation
| int distance_i |
| int distances[NUMBER_OF_DISTANCES] |
| bool measure |
| int measurement_i |
| int measurements[NUMBER_OF_MEASUREMENTS] |
