#include <stdio.h>#include <stdlib.h>#include <math.h>#include <robomath.h>#include "laser-nav.h"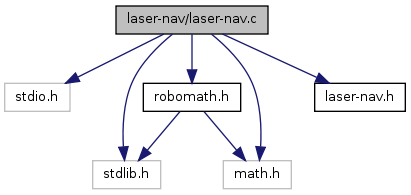
Functions | |
| void | time2angle (struct pln_time_state ts, struct pln_aangle_state *aas) |
| D=S2 F C=R3 +-------------+-------------+ | | | | | +H | | | | | R1+ +L=S1 =K| | | +r | | +G | | | | | +-------------+-------------+ A=S3 E B=R2. | |
| void | aangle2angle (struct pln_aangle_state aas, struct pln_angle_state *as) |
| Convert absolute angles to relative angles (to angles between reflectors). | |
| void | pln_get_line (struct pln_point a, struct pln_point b, struct pln_line *line) |
| Get line parametrization from 2 points. | |
| void | pln_get_oline (struct pln_line line, struct pln_point c, struct pln_line *oline) |
| Get the ortogonal line if we know 1 line and the cross point. | |
| void | pln_solve_quad (struct pln_fquad quad, struct pln_compl *sol1, struct pln_compl *sol2) |
| Solve quadratic equation. | |
| void | pln_solve_2quad (struct pln_fquad_2var form1, struct pln_fquad_2var form2, struct pln_point *sol1, struct pln_point *sol2) |
| Solve 2 quadratic equations with 2 unknown variables. | |
| void | pln_circ_line_cross (struct pln_circle circle, struct pln_line line, struct pln_point *sol1, struct pln_point *sol2) |
| Find cross points of the line and the circle (condisering the line cross center of the circle). | |
| void | pln_get_circle2 (struct pln_circ c, struct pln_circle *circle) |
| Get parameters of the circle if we know 1 angle and 3 points. | |
| void | pln_get_circle (struct pln_circ c, struct pln_circle *circle) |
| Get parameters of the circle if we know 1 angle and 3 points. | |
| void | pln_circ2form (struct pln_circle circle, struct pln_fquad_2var *form) |
| Get parameters of the quadratic equations from the circle parameters. | |
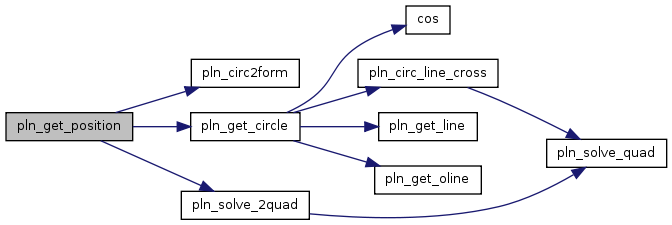
| void | pln_get_position (struct pln_angle_state as, struct pln_pos_state *pos) |
| Get position from the measured angles. | |
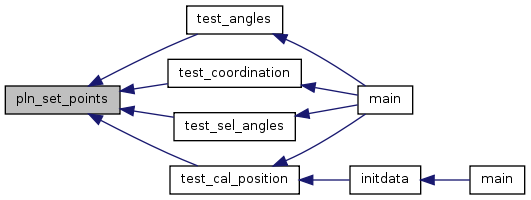
| void | pln_set_points () |
| Set values of points we already know for later use. | |
| int | cmpang (const void *a, const void *b) |
| Compare evaluation of angles. | |
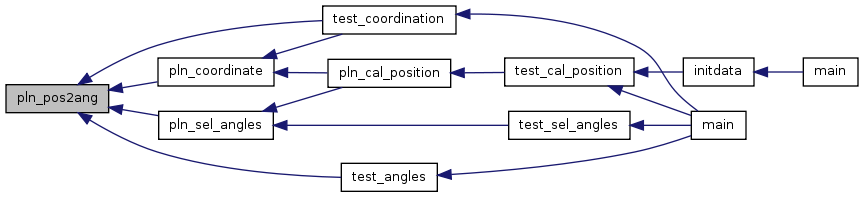
| void | pln_pos2ang (struct pln_pos_state ps, struct pln_aangle_state *aas) |
| Convert position to angles. | |
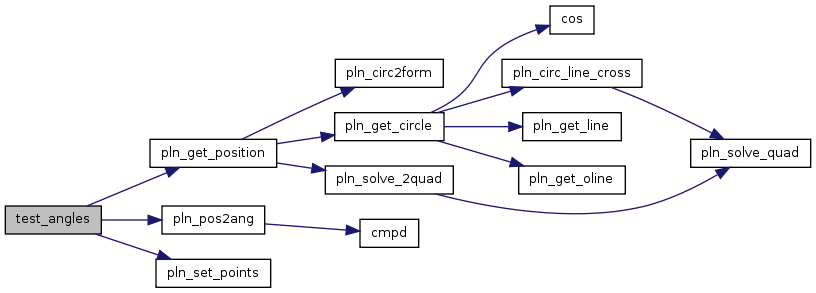
| void | test_angles (struct pln_point *positions, int *poscount) |
| Test all possible positions. | |
| void | pln_coordinate (struct pln_pos_state estpos, struct pln_aangle_state aas, struct pln_angle_state *as) |
| Angle coordinations. | |
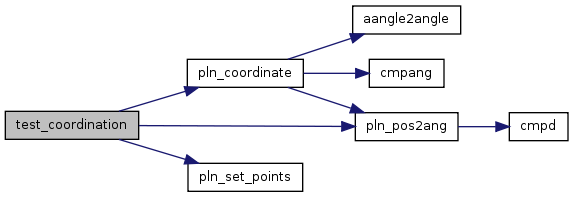
| void | test_coordination () |
| Test pln_coordinate() function. | |
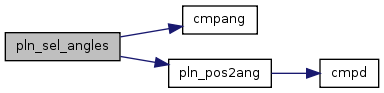
| void | pln_sel_angles (struct pln_pos_state estpos, double *angles, int angcount, struct pln_aangle_state *maas) |
| Select angles most probable from all measured angles. | |
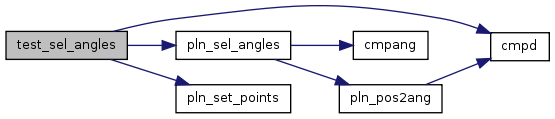
| void | test_sel_angles () |
| Generate random angles and test if the function pln_sel_angles() works correctly. | |
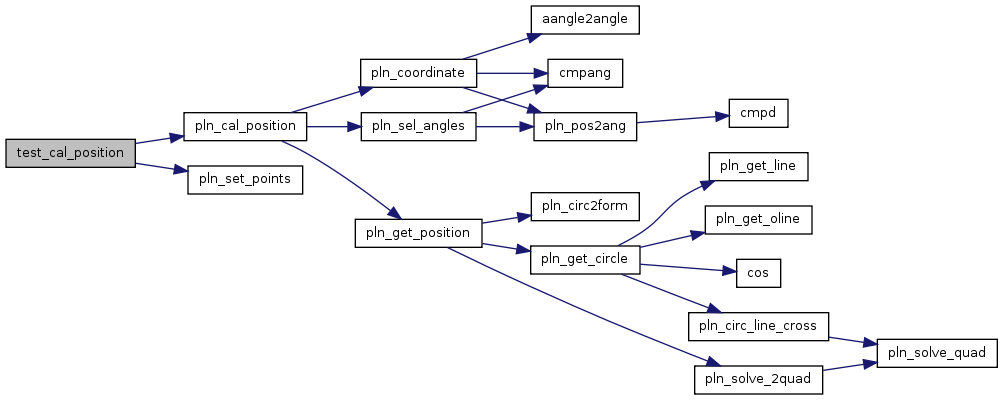
| void | pln_cal_position (unsigned int *times, unsigned int timecnt, struct pln_pos_state act_pos, struct pln_pos_state *est_pos) |
| Calculate position from measured times and from the actual position. | |
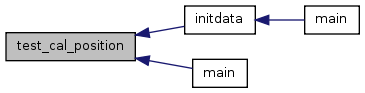
| void | test_cal_position (struct pln_point *positions, int *poscount) |
| Test this library. | |
Function Documentation
| void aangle2angle | ( | struct pln_aangle_state | aas, | |
| struct pln_angle_state * | as | |||
| ) |
Convert absolute angles to relative angles (to angles between reflectors).
- Parameters:
-
aas absolute angles as relative angles

| int cmpang | ( | const void * | a, | |
| const void * | b | |||
| ) |
Compare evaluation of angles.
Used by qsort().

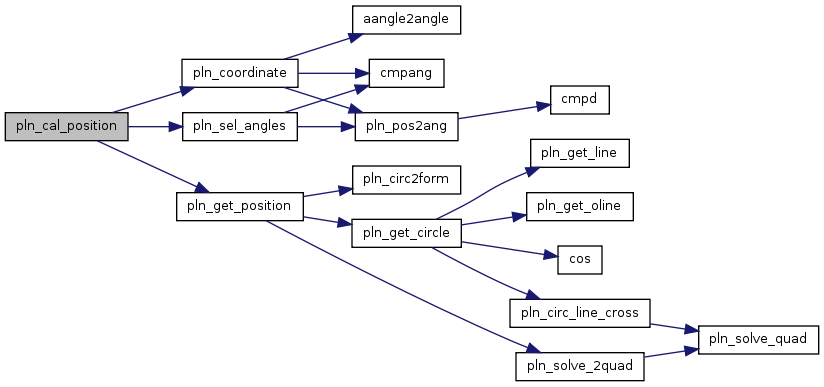
| void pln_cal_position | ( | unsigned int * | times, | |
| unsigned int | timecnt, | |||
| struct pln_pos_state | act_pos, | |||
| struct pln_pos_state * | est_pos | |||
| ) |
Calculate position from measured times and from the actual position.
- Parameters:
-
times measured times. The period is expected on the 1st position. timecnt number of measured times act_pos actual position est_pos calculated position

| void pln_circ2form | ( | struct pln_circle | circle, | |
| struct pln_fquad_2var * | form | |||
| ) |
Get parameters of the quadratic equations from the circle parameters.
- Parameters:
-
circle parameters of the circle form quadratic formular

| void pln_circ_line_cross | ( | struct pln_circle | circle, | |
| struct pln_line | line, | |||
| struct pln_point * | sol1, | |||
| struct pln_point * | sol2 | |||
| ) |
Find cross points of the line and the circle (condisering the line cross center of the circle).
- Parameters:
-
circle parameters of the circle line parameters of the line sol1 cross point 1 sol2 cross point 2


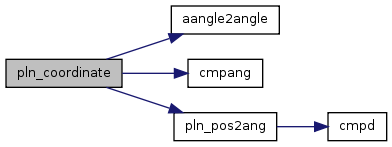
| void pln_coordinate | ( | struct pln_pos_state | estpos, | |
| struct pln_aangle_state | aas, | |||
| struct pln_angle_state * | as | |||
| ) |
Angle coordinations.
From the estimated position (x,y,head) and measured times determine correctly angles needed to count the position by measured angles.
- Parameters:
-
estpos estimated position aas measured angles (after selection) as angles between reflectors (correctly aligned)

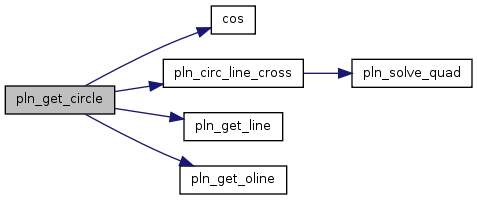
| void pln_get_circle | ( | struct pln_circ | c, | |
| struct pln_circle * | circle | |||
| ) |
Get parameters of the circle if we know 1 angle and 3 points.
- Parameters:
-
c angle and points that we already know circle output circle

| void pln_get_circle2 | ( | struct pln_circ | c, | |
| struct pln_circle * | circle | |||
| ) |
Get parameters of the circle if we know 1 angle and 3 points.
This function is similar to another one in this program, but it works only with ortogonal sides.
- Parameters:
-
c angle and points that we already know circle output circle

Get line parametrization from 2 points.
- Parameters:
-
a point A b point B line output line

Get the ortogonal line if we know 1 line and the cross point.
- Parameters:
-
line the line that we know c the cross point between 2 lines oline ortogonal output line

| void pln_get_position | ( | struct pln_angle_state | as, | |
| struct pln_pos_state * | pos | |||
| ) |
Get position from the measured angles.
FUNCTION PROTOTYPES.
- Parameters:
-
as angles between reflectors pos enumerated position

| void pln_pos2ang | ( | struct pln_pos_state | ps, | |
| struct pln_aangle_state * | aas | |||
| ) |
Convert position to angles.
- Parameters:
-
ps position to be converted aas 3 angles between head and reflectors

| void pln_sel_angles | ( | struct pln_pos_state | estpos, | |
| double * | angles, | |||
| int | angcount, | |||
| struct pln_aangle_state * | maas | |||
| ) |
Select angles most probable from all measured angles.
Use estimated position to evaluate them.
- Parameters:
-
estpos estimated position angles measured angles (times) angcount amount of measured angles maas selected angles

| void pln_set_points | ( | ) |
Set values of points we already know for later use.
| void pln_solve_2quad | ( | struct pln_fquad_2var | form1, | |
| struct pln_fquad_2var | form2, | |||
| struct pln_point * | sol1, | |||
| struct pln_point * | sol2 | |||
| ) |
Solve 2 quadratic equations with 2 unknown variables.
- Parameters:
-
form1 equation 1 form2 equation 2 sol1 solution 1 sol2 solution 2


Solve quadratic equation.
- Parameters:
-
quad parameters of the quadratic equation sol1 solution 1 sol2 solution 2

| void test_angles | ( | struct pln_point * | positions, | |
| int * | poscount | |||
| ) |
Test all possible positions.
Convert positions to angles and then do the reverse conversion.
- Parameters:
-
positions positions of wanted points poscount count of positions

| void test_cal_position | ( | struct pln_point * | positions, | |
| int * | poscount | |||
| ) |
Test this library.
Set some actual position, give it measured times and hope that everything will works correctly.
- Parameters:
-
positions positions of wanted points poscount count of positions
| void test_coordination | ( | ) |
Test pln_coordinate() function.
For any value of head`s angle it should return the same alfa, beta and gama.

| void test_sel_angles | ( | ) |
Generate random angles and test if the function pln_sel_angles() works correctly.

| void time2angle | ( | struct pln_time_state | ts, | |
| struct pln_aangle_state * | aas | |||
| ) |
D=S2 F C=R3 +-------------+-------------+ | | | | | +H | | | | | R1+ +L=S1 =K| | | +r | | +G | | | | | +-------------+-------------+ A=S3 E B=R2.
Fixed points (known points) [x,y] A - [0,0] B - [width,0] C - [width,height] D - [0,height] E - [width/2,0] F - [width/2,height] G - [width/2,height/4] H - [width/2,height/4*3] K - [0,height/2] L - [width,height/2] Our reflectors R1, R2, R3 Opponent`s reflectors S1, S2, S3
Unknown point r - Position of the robot
Angles: theta1 = from robot`s head to the first reflector theta2 = from robot`s head to the second reflector theta3 = from robot`s head to the third reflector alfa = angle R3-r-R2 (S2-r-S3) beta = angle R1-r-R3 (S3-r-S1) gama = angle R1-r-R2 (S1-r-S2)
Angle`s sense - counterclockwise
Terminology:
- absolute angle - angle between head and reflector (theta1,theta2,..)
- relative angle - angle between reflectors (alfa, beta, ...) Convert times to angles
- Parameters:
-
ts measured times and period aas absolute angles
