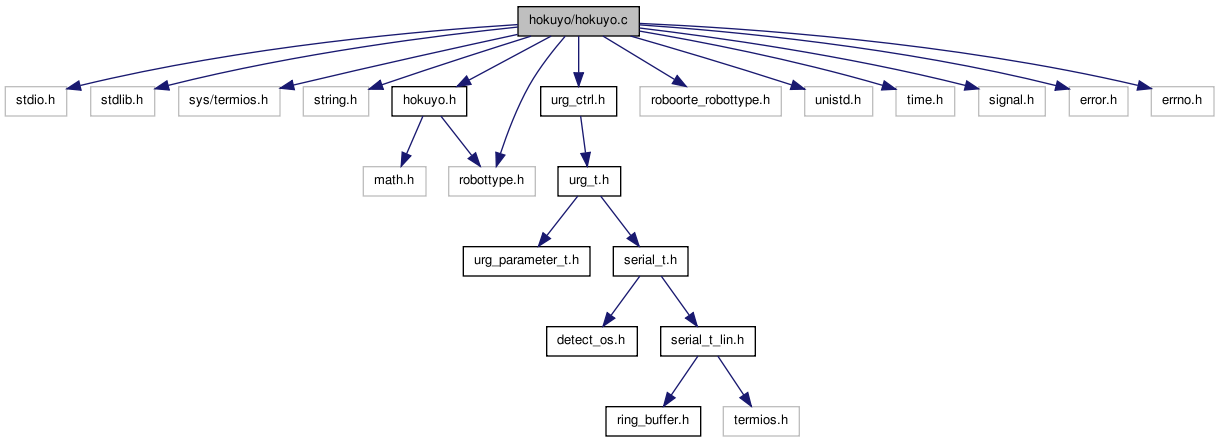
#include <stdio.h>#include <stdlib.h>#include <sys/termios.h>#include <string.h>#include "hokuyo.h"#include <urg_ctrl.h>#include <robottype.h>#include <roboorte_robottype.h>#include <unistd.h>#include <time.h>#include <signal.h>#include <error.h>#include <errno.h>
Include dependency graph for hokuyo.c:
Defines | |
| #define | HOKUYO_DEVICE "/dev/ttyACM0" |
| : This is a demo program to obtain 10 scan data from URG-Series and save them into the file. | |
| #define | COMPILE_TIME_ASSERT(cond, msg) typedef char msg[(cond) ? 1 : -1] |
Functions | |
| COMPILE_TIME_ASSERT (HOKUYO_FINAL_MEASUREMENT-HOKUYO_INITIAL_MEASUREMENT==HOKUYO_ARRAY_SIZE, wrong_size_of_hokuyo_scan_type) | |
| int | hokuyo_init (char *device) |
| int | main (int argc, char **argv) |
Variables | |
| int | interrupt = 0 |
| struct robottype_orte_data | orte |
Define Documentation
| #define HOKUYO_DEVICE "/dev/ttyACM0" |
: This is a demo program to obtain 10 scan data from URG-Series and save them into the file.
: This sample source is a referece for the user when creating his/her program and does not gurantee for users program : Hokuyo Automatic Co., Ltd does not bear responsibility for any loss or damage caused due to this demo program. : Mention the publisher's name when distributing this source or its part to the third party HOKUYO AUTOMATIC CO.,LTD.
Function Documentation
| COMPILE_TIME_ASSERT | ( | HOKUYO_FINAL_MEASUREMENT- | HOKUYO_INITIAL_MEASUREMENT = =HOKUYO_ARRAY_SIZE, |
|
| wrong_size_of_hokuyo_scan_type | ||||
| ) |
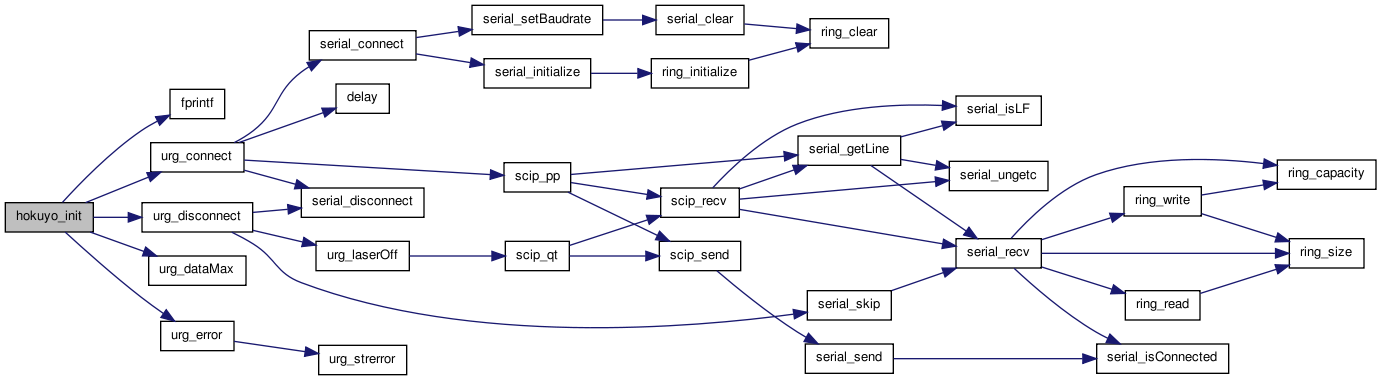
| int hokuyo_init | ( | char * | device | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

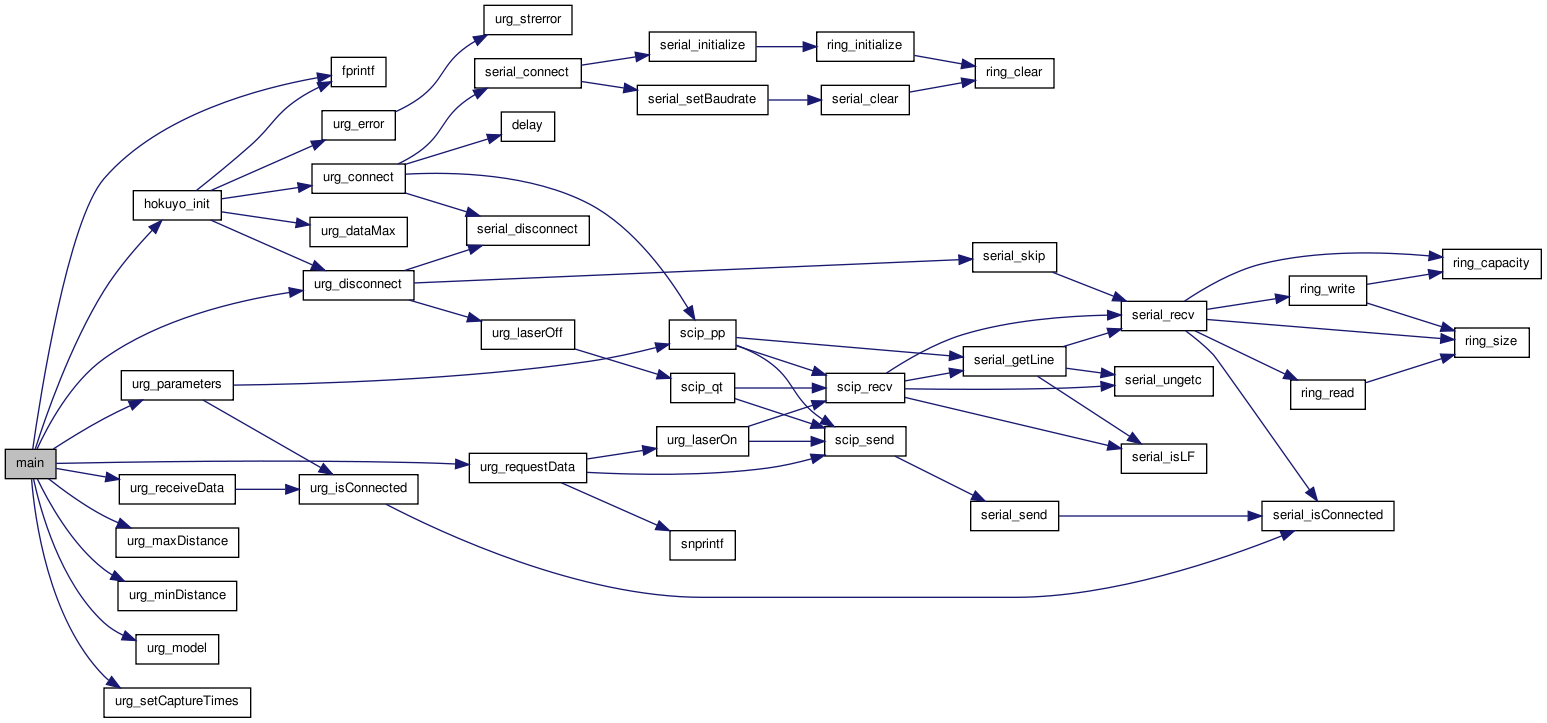
| int main | ( | int | argc, | |
| char ** | argv | |||
| ) |
Here is the call graph for this function:
Variable Documentation
| int interrupt = 0 |
| struct robottype_orte_data orte |
