|
| |
| #define | CAN_SPEED 1000000 |
| timer0 & ISR | |
| #define | CAN_ISR 0 |
| timer0 & ISR | |
| #define | ADC_ISR 1 |
| timer0 & ISR | |
| #define | JAW_LEFT 0 |
| timer0 & ISR | |
| #define | JAW_RIGHT 1 |
| timer0 & ISR | |
| #define | TIMER_IRQ_PRIORITY 5 |
| timer0 & ISR | |
| #define | BUMPER_LEFT 18 |
| timer0 & ISR | |
| #define | BUMPER_RIGHT 9 |
| timer0 & ISR | |
| #define | BUMPER_LEFT_ACROSS 19 |
| timer0 & ISR | |
| #define | BUMPER_RIGHT_ACROSS 17 |
| timer0 & ISR | |
| #define | BUMPER_REAR_LEFT 15 |
| timer0 & ISR | |
| #define | BUMPER_REAR_RIGHT 2 |
| timer0 & ISR | |
| struct fsm | fsm_jaw_right |
| timer0 & ISR | |
| struct fsm | fsm_jaw_left |
| timer0 & ISR | |
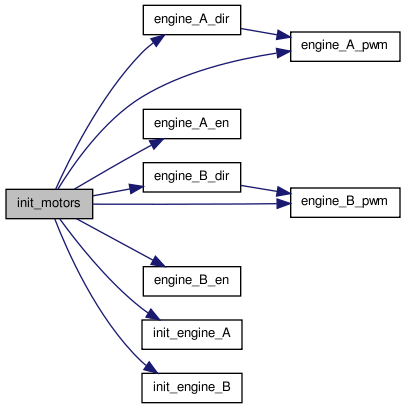
| void | init_motors (void) |
| timer0 & ISR | |
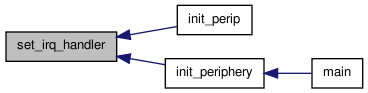
| void | set_irq_handler (uint8_t source, uint8_t irq_vect, void(*handler)()) |
| timer0 & ISR | |
| void | timer0_irq () |
| timer0 & ISR | |
| void | CAN_rx (can_msg_t *msg) |
| timer0 & ISR | |
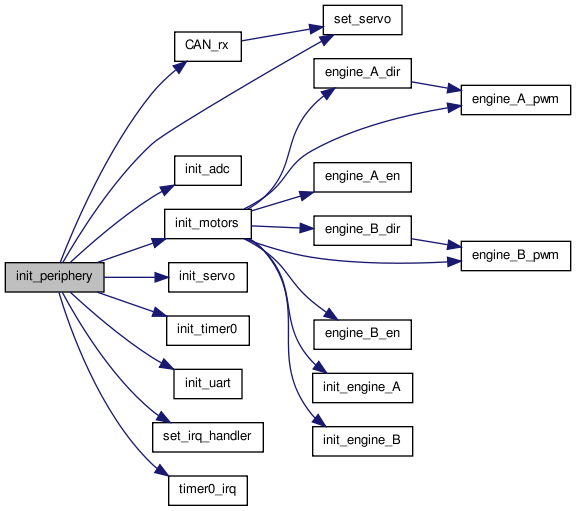
| void | init_periphery (void) |
| timer0 & ISR | |
| void | can_send_status (struct fsm *fsm) |
| timer0 & ISR | |
| void | dbg_print_time () |
| timer0 & ISR | |
| void | fsm_jaw_init (struct fsm *fsm, enum event event) |
| timer0 & ISR | |
| void | blink_led () |
| timer0 & ISR | |
| void | handle_bumper () |
| timer0 & ISR | |
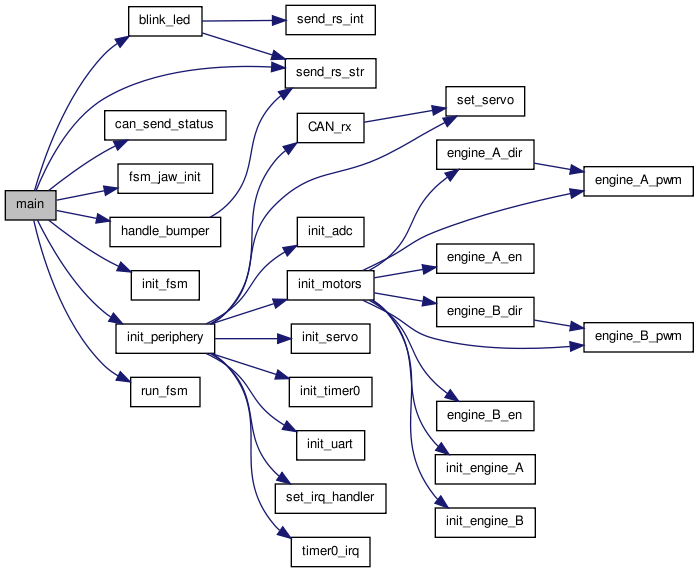
| int | main (void) |
| timer0 & ISR | |
|
| |
| #define | CAN_SPEED 1000000 |
| timer0 & ISR | |
| #define | CAN_ISR 0 |
| timer0 & ISR | |
| #define | ADC_ISR 1 |
| timer0 & ISR | |
| #define | TIMER_IRQ_PRIORITY 5 |
| timer0 & ISR | |
| #define | END_SWITCH_UP_PIN 9 |
| timer0 & ISR | |
| #define | END_SWITCH_DOWN_PIN 8 |
| timer0 & ISR | |
| #define | SWITCH_HOME_PIN 19 |
| timer0 & ISR | |
| #define | START_PIN 15 |
| timer0 & ISR | |
| #define | COLOR_PIN 18 |
| timer0 & ISR | |
| #define | SWITCH_STRATEGY_PIN 17 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_FAST 50 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_SLOW 300 |
| timer0 & ISR | |
| #define | START_SEND_FAST_COUNT 10 |
| timer0 & ISR | |
| #define | LIFT_IRC_VAL_MAX 0x19C |
| timer0 & ISR | |
| #define | LIFT_IRC_VAL_MIN 0x0 |
| timer0 & ISR | |
| #define | IRC_A_PIN 2 |
| timer0 & ISR | |
| #define | IRC_B_PIN 3 |
| timer0 & ISR | |
| #define | IRC_A_MASK 0x04 |
| timer0 & ISR | |
| #define | IRC_B_MASK 0x08 |
| timer0 & ISR | |
| #define | IRC_AB_MASK 0x0C |
| timer0 & ISR | |
| struct fsm | fsm_lift |
| timer0 & ISR | |
| void | lift_switches_handler (void) |
| timer0 & ISR | |
| int32_t | irc_read_tick () |
| timer0 & ISR | |
| void | start_button (void) |
| timer0 & ISR | |
| void | can_send_status (void) |
| timer0 & ISR | |
| void | fsm_lift_init (struct fsm *fsm, enum event event) |
| timer0 & ISR | |
| void | robot_switches_handler () |
| timer0 & ISR | |
|
| |
| #define | CAN_SPEED 1000000 |
| timer0 & ISR | |
| #define | CAN_ISR 0 |
| timer0 & ISR | |
| #define | ADC_ISR 1 |
| timer0 & ISR | |
| #define | TIMER_IRQ_PRIORITY 5 |
| timer0 & ISR | |
| #define | START_PIN 15 |
| timer0 & ISR | |
| #define | BUTTON_1_PIN EXPPORT_1 |
| timer0 & ISR | |
| #define | BUTTON_2_PIN EXPPORT_3 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_FAST 50 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_SLOW 300 |
| timer0 & ISR | |
| #define | START_SEND_FAST_COUNT 10 |
| timer0 & ISR | |
| #define | BUMPER_PIN 17 |
| timer0 & ISR | |
| #define | COLOR_PIN 3 |
| timer0 & ISR | |
| #define | BUMPER_LEFT 19 |
| timer0 & ISR | |
| #define | BUMPER_RIGHT 9 |
| timer0 & ISR | |
| struct fsm | fsm_vidle |
| timer0 & ISR | |
| void | fsm_vidle_init (struct fsm *fsm, enum event event) |
| timer0 & ISR | |
| void | dummy_wait () |
| timer0 & ISR | |
|
| |
| #define | CAN_SPEED 1000000 |
| timer0 & ISR | |
| #define | CAN_ISR 0 |
| timer0 & ISR | |
| #define | ADC_ISR 1 |
| timer0 & ISR | |
| #define | TIMER_IRQ_PRIORITY 5 |
| timer0 & ISR | |
| #define | START_PIN 15 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_FAST 50 |
| timer0 & ISR | |
| #define | START_SEND_PRIOD_SLOW 300 |
| timer0 & ISR | |
| #define | START_SEND_FAST_COUNT 10 |
| timer0 & ISR | |
| #define | BUMPER_PIN 17 |
| timer0 & ISR | |
| #define | COLOR_PIN 3 |
| timer0 & ISR | |
| #define | BUMPER_LEFT 19 |
| timer0 & ISR | |
| #define | BUMPER_RIGHT 9 |
| timer0 & ISR | |
| struct fsm | fsm_vidle |
| timer0 & ISR | |
| void | test_vhn () |
| timer0 & ISR | |
Define Documentation
| #define ADC_ISR 1 |
timer0 & ISR
| #define ADC_ISR 1 |
timer0 & ISR
| #define ADC_ISR 1 |
timer0 & ISR
| #define ADC_ISR 1 |
timer0 & ISR
| #define BUMPER_LEFT 18 |
timer0 & ISR
| #define BUMPER_LEFT 19 |
timer0 & ISR
| #define BUMPER_LEFT 19 |
timer0 & ISR
| #define BUMPER_LEFT_ACROSS 19 |
timer0 & ISR
| #define BUMPER_PIN 17 |
timer0 & ISR
| #define BUMPER_PIN 17 |
timer0 & ISR
| #define BUMPER_REAR_LEFT 15 |
timer0 & ISR
| #define BUMPER_REAR_RIGHT 2 |
timer0 & ISR
| #define BUMPER_RIGHT 9 |
timer0 & ISR
| #define BUMPER_RIGHT 9 |
timer0 & ISR
| #define BUMPER_RIGHT 9 |
timer0 & ISR
| #define BUMPER_RIGHT_ACROSS 17 |
timer0 & ISR
| #define BUTTON_1_PIN EXPPORT_1 |
timer0 & ISR
| #define BUTTON_2_PIN EXPPORT_3 |
timer0 & ISR
| #define CAN_ISR 0 |
timer0 & ISR
| #define CAN_ISR 0 |
timer0 & ISR
| #define CAN_ISR 0 |
timer0 & ISR
| #define CAN_ISR 0 |
timer0 & ISR
| #define CAN_SPEED 1000000 |
timer0 & ISR
| #define CAN_SPEED 1000000 |
timer0 & ISR
| #define CAN_SPEED 1000000 |
timer0 & ISR
| #define CAN_SPEED 1000000 |
timer0 & ISR
| #define COLOR_PIN 3 |
timer0 & ISR
| #define COLOR_PIN 18 |
timer0 & ISR
| #define COLOR_PIN 3 |
timer0 & ISR
| #define END_SWITCH_DOWN_PIN 8 |
timer0 & ISR
| #define END_SWITCH_UP_PIN 9 |
timer0 & ISR
| #define IRC_A_MASK 0x04 |
timer0 & ISR
| #define IRC_A_PIN 2 |
timer0 & ISR
| #define IRC_AB_MASK 0x0C |
timer0 & ISR
| #define IRC_B_MASK 0x08 |
timer0 & ISR
| #define IRC_B_PIN 3 |
timer0 & ISR
| #define JAW_LEFT 0 |
timer0 & ISR
| #define JAW_RIGHT 1 |
timer0 & ISR
| #define LIFT_IRC_VAL_MAX 0x19C |
timer0 & ISR
| #define LIFT_IRC_VAL_MIN 0x0 |
timer0 & ISR
| #define START_PIN 15 |
timer0 & ISR
| #define START_PIN 15 |
timer0 & ISR
| #define START_PIN 15 |
timer0 & ISR
| #define START_SEND_FAST_COUNT 10 |
timer0 & ISR
| #define START_SEND_FAST_COUNT 10 |
timer0 & ISR
| #define START_SEND_FAST_COUNT 10 |
timer0 & ISR
| #define START_SEND_PRIOD_FAST 50 |
timer0 & ISR
| #define START_SEND_PRIOD_FAST 50 |
timer0 & ISR
| #define START_SEND_PRIOD_FAST 50 |
timer0 & ISR
| #define START_SEND_PRIOD_SLOW 300 |
timer0 & ISR
| #define START_SEND_PRIOD_SLOW 300 |
timer0 & ISR
| #define START_SEND_PRIOD_SLOW 300 |
timer0 & ISR
| #define SWITCH_HOME_PIN 19 |
timer0 & ISR
| #define SWITCH_STRATEGY_PIN 17 |
timer0 & ISR
| #define TIMER_IRQ_PRIORITY 5 |
timer0 & ISR
| #define TIMER_IRQ_PRIORITY 5 |
timer0 & ISR
| #define TIMER_IRQ_PRIORITY 5 |
timer0 & ISR
| #define TIMER_IRQ_PRIORITY 5 |
timer0 & ISR
Function Documentation
| void blink_led | ( | ) |
timer0 & ISR
| void CAN_rx | ( | can_msg_t * | msg | ) |
timer0 & ISR


| void can_send_status | ( | struct fsm * | fsm | ) |
timer0 & ISR
| void can_send_status | ( | void | ) |
timer0 & ISR
| void dbg_print_time | ( | ) |
timer0 & ISR

| void dummy_wait | ( | void | ) |
timer0 & ISR
timer0 & ISR

timer0 & ISR
| void handle_bumper | ( | ) |
timer0 & ISR


| void init_motors | ( | void | ) |
timer0 & ISR

| void init_periphery | ( | void | ) |
timer0 & ISR

| int32_t irc_read_tick | ( | ) |
timer0 & ISR

| void lift_switches_handler | ( | void | ) |
timer0 & ISR

| int main | ( | void | ) |
timer0 & ISR
| void robot_switches_handler | ( | ) |
timer0 & ISR


| void set_irq_handler | ( | uint8_t | source, | |
| uint8_t | irq_vect, | |||
| void(*)() | handler | |||
| ) |
timer0 & ISR
| void start_button | ( | void | ) |
timer0 & ISR
| void test_vhn | ( | ) |
timer0 & ISR
| void timer0_irq | ( | ) |
timer0 & ISR
Variable Documentation
| struct fsm fsm_jaw_left |
timer0 & ISR
| struct fsm fsm_jaw_right |
timer0 & ISR
