#include <trgen.h>
Inherits TrajectorySegment.
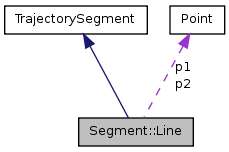
Collaboration diagram for Segment::Line:
Public Member Functions | |
| Line (Point *_p1, Point *_p2) | |
| virtual void | setMaxV (const TrajectoryConstraints &constr) |
| virtual double | getLength () const |
| Length of the segment in meters. | |
| virtual double | getDistance (double time) const |
| double | getAngle () |
| virtual void | getPointAt (double distance, Point *p) |
Returns the point of the segment, located at the specific distance from the beginning or end. | |
| virtual void | shortenBy (double distance, Point *newEnd) |
| Shorten the segment by a specific length. | |
| virtual TrajectorySegment * | splitAt (double distance, Point *newEnd) |
| Splits the segment at the specified point. | |
| virtual TrajectorySegment * | splitAtByTime (double time, Point *newEnd) |
| virtual void | getRefPos (double time, Pos &rp) |
| Return the reference position at some time. | |
Constructor & Destructor Documentation
Here is the call graph for this function:
Here is the caller graph for this function:
Member Function Documentation
| double Segment::Line::getAngle | ( | ) | [inline] |
| double Segment::Line::getDistance | ( | double | time | ) | const [virtual] |
Implements TrajectorySegment.
| virtual double Segment::Line::getLength | ( | ) | const [inline, virtual] |
Length of the segment in meters.
Implements TrajectorySegment.
| void Segment::Line::getPointAt | ( | double | distance, | |
| Point * | p | |||
| ) | [virtual] |
Returns the point of the segment, located at the specific distance from the beginning or end.
- Parameters:
-
[in] distance Distance from the beginning (if positive) or end (if negative) of the segment in meters. [out] p Pointer to the point to sore the result.
Implements TrajectorySegment.
Here is the caller graph for this function:
| void Segment::Line::getRefPos | ( | double | time, | |
| Pos & | rp | |||
| ) | [virtual] |
Return the reference position at some time.
- Parameters:
-
[in] time Time (within this segment time range). [out] rp Reference position.
Implements TrajectorySegment.
| void Segment::Line::setMaxV | ( | const TrajectoryConstraints & | constr | ) | [virtual] |
Implements TrajectorySegment.
| void Segment::Line::shortenBy | ( | double | distance, | |
| Point * | newEnd | |||
| ) | [virtual] |
Shorten the segment by a specific length.
- Parameters:
-
[in] distance Distance from the end (if positive) of the segment, where should be the end of the segment. [in] newEnd Point which will be set to the position of the new end.
Implements TrajectorySegment.
Here is the call graph for this function:

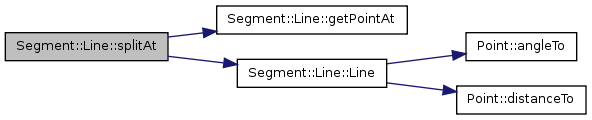
| TrajectorySegment * Segment::Line::splitAt | ( | double | distance, | |
| Point * | newEnd | |||
| ) | [virtual] |
Splits the segment at the specified point.
The result will be two segments following the same trajectory as the original one.
- Parameters:
-
[in] distance Distance of the split from the beginning of the segment. [in] newEnd Point which will be used as a middle point joining the two segments.
- Returns:
- Pointer to the newly created segment.
Implements TrajectorySegment.
Here is the call graph for this function:
| TrajectorySegment * Segment::Line::splitAtByTime | ( | double | time, | |
| Point * | newEnd | |||
| ) | [virtual] |

The documentation for this class was generated from the following files:
