#include <ortedisplay.h>
Signals | |
| void | fsm_sig (UDE_fsm_t fsm, QString state) |
| void | status_sig (UDE_component_t c, UDE_hw_status_t s) |
| void | position_sig (double x, double y, double phi) |
| void | pwr_sig (double voltage33, double voltage50, double voltage80, double voltageBAT) |
| void | color_sig (char color) |
Public Member Functions | |
| Ortedisplay () | |
| void | createOrte () |
| void | nevim (UDE_fsm_t fsm, QString state) |
| void | status_con (UDE_component_t c, UDE_hw_status_t s) |
| void | position_con (void) |
| void | pwr_con (void) |
| void | color_con (char color) |
Public Attributes | |
| struct robottype_orte_data | orte |
Constructor & Destructor Documentation
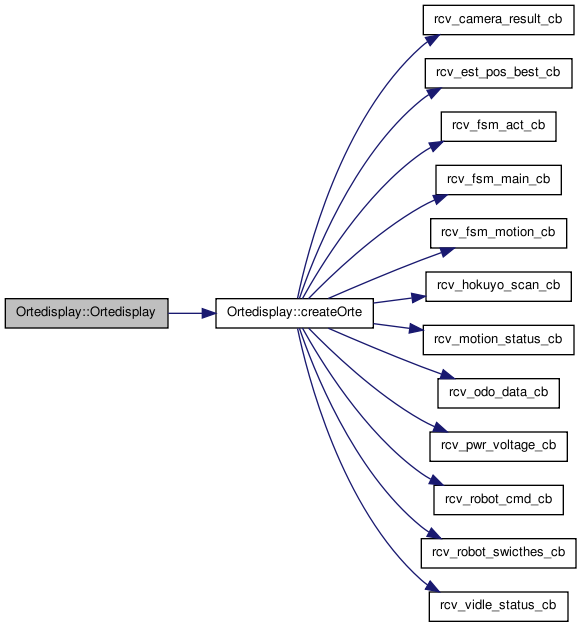
| Ortedisplay::Ortedisplay | ( | ) |
Here is the call graph for this function:
Member Function Documentation
| void Ortedisplay::color_con | ( | char | color | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void Ortedisplay::color_sig | ( | char | color | ) | [signal] |
Here is the caller graph for this function:

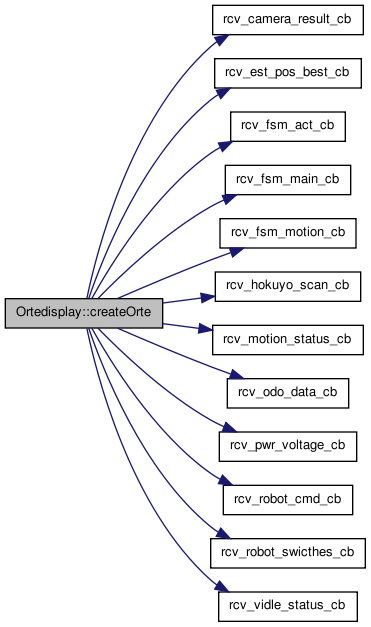
| void Ortedisplay::createOrte | ( | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void Ortedisplay::fsm_sig | ( | UDE_fsm_t | fsm, | |
| QString | state | |||
| ) | [signal] |
Here is the caller graph for this function:

| void Ortedisplay::nevim | ( | UDE_fsm_t | fsm, | |
| QString | state | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void Ortedisplay::position_con | ( | void | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void Ortedisplay::position_sig | ( | double | x, | |
| double | y, | |||
| double | phi | |||
| ) | [signal] |
Here is the caller graph for this function:

| void Ortedisplay::pwr_con | ( | void | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void Ortedisplay::pwr_sig | ( | double | voltage33, | |
| double | voltage50, | |||
| double | voltage80, | |||
| double | voltageBAT | |||
| ) | [signal] |
Here is the caller graph for this function:

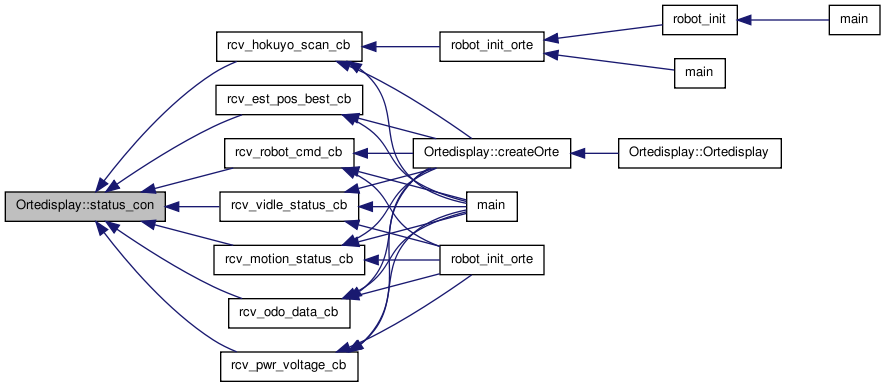
| void Ortedisplay::status_con | ( | UDE_component_t | c, | |
| UDE_hw_status_t | s | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:
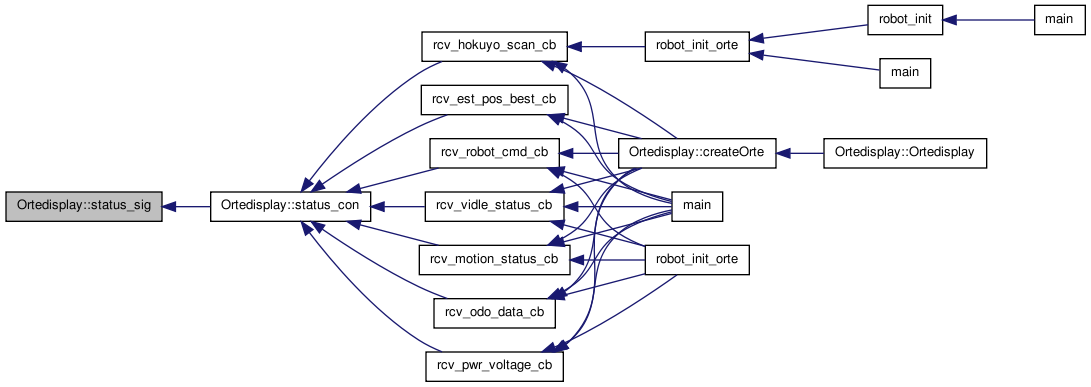
| void Ortedisplay::status_sig | ( | UDE_component_t | c, | |
| UDE_hw_status_t | s | |||
| ) | [signal] |
Here is the caller graph for this function:
Member Data Documentation
| struct robottype_orte_data Ortedisplay::orte |
The documentation for this class was generated from the following files:
- display-qt/ortedisplay.h
- display-qt/ortedisplay.cpp
