Robot's actuators control library. More...
#include <robot.h>#include <actuators.h>
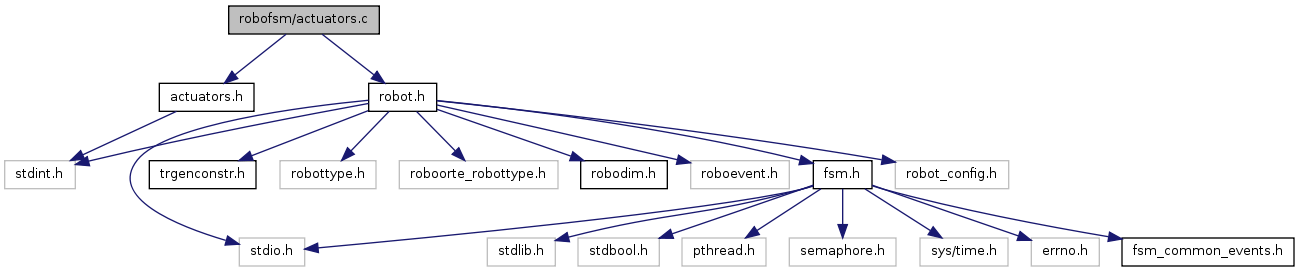
Include dependency graph for actuators.c:
Functions | |
| void | act_init (struct robottype_orte_data *ortedata) |
| void | act_camera_on (void) |
| void | act_camera_off (void) |
| void | act_lift (uint16_t req_pos, char speed, char homing) |
| void | act_jaws (jaws_cmds cmd) |
| uint16_t | act_jaw_left_get_last_reqest (void) |
| uint16_t | act_jaw_right_get_last_reqest (void) |
| uint16_t | act_lift_get_last_reqest (void) |
Detailed Description
Robot's actuators control library.
- Date:
- 2009-2010
Function Documentation
| void act_camera_off | ( | void | ) |
Here is the caller graph for this function:

| void act_camera_on | ( | void | ) |
Here is the caller graph for this function:

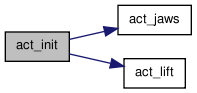
| void act_init | ( | struct robottype_orte_data * | ortedata | ) |
Here is the call graph for this function:
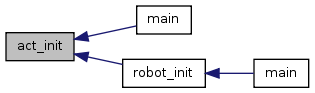
Here is the caller graph for this function:
| uint16_t act_jaw_left_get_last_reqest | ( | void | ) |
Here is the caller graph for this function:

| uint16_t act_jaw_right_get_last_reqest | ( | void | ) |
Here is the caller graph for this function:

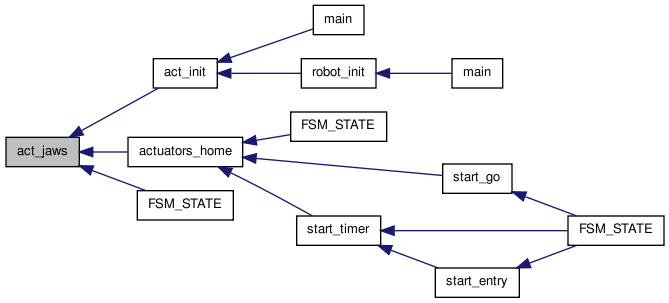
| void act_jaws | ( | jaws_cmds | cmd | ) |
Here is the caller graph for this function:
| void act_lift | ( | uint16_t | req_pos, | |
| char | speed, | |||
| char | homing | |||
| ) |
Here is the caller graph for this function:
| uint16_t act_lift_get_last_reqest | ( | void | ) |
Here is the caller graph for this function:

