{kind=link}
Galerie robotů
Eurobot 2007 - Robot Recycling Rally
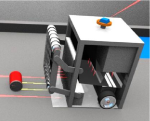

Robot sbírá a třídí odpad. Mechnické části jsou založeny na hliníkové konstrukci, rotujících válcích, gumových dopravnících a několika otevíratelných přepážkách. Elektronika robotu se skládá z hlavní řídicí jednotky a několika elektronických subsystémů, založených na mikroprocesorech Hitachi/Renesas H8S2638. Hlavní řídicí jednotka je deska s procesorem PowerPC, na které běží operační systém GNU/Linux. Komunikace mezi subsystémy probíhá po sběrnici CAN. Robot je poháněn dvěmi stejnosměrnými bezkomutátorovými motory od firmy MAXON. Dále používáme několik typů servomotorů a motorů pro ovládání přepážek a dalších pohyblivých součástí.. Robot je vybaven několika IR senzory pro detekci odpadu, rozpoznávání odpadu, detekci oponenta a detekci překážek.
Vývoj programů probíhal většinou v C/C++ pomocí volných softwarových nástrojů a knihoven. Jednotlivé části jsou navrhovány s ohledem na univerzálnost a také real-time aspekty aplikace. Tyto požadavky nás přiměly k použití komponent, jako je ORTE (OCERA Real-Time Ethernet) či OMK (OCERA Make System). Lokalizace robotu probíhá prostřednictvím laserového majáku, pasivních reflektorů a efektivního algoritmu pro lokalizaci mobilních robotů, který se nazývá Monte Carlo Localization.