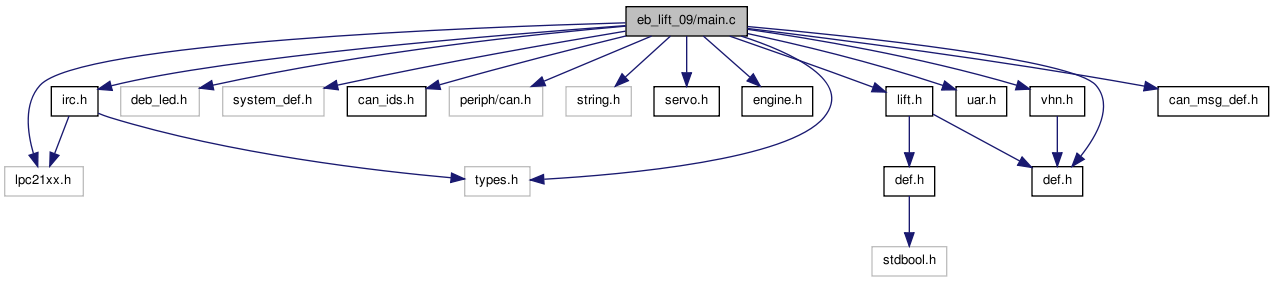
#include <lpc21xx.h>#include <types.h>#include <deb_led.h>#include <system_def.h>#include <can_ids.h>#include <periph/can.h>#include <string.h>#include "servo.h"#include "engine.h"#include "lift.h"#include "uar.h"#include "def.h"#include "irc.h"#include "vhn.h"#include <can_msg_def.h>
Include dependency graph for main.c:
|
| |
| struct fsm | fsm_lift |
| timer0 & ISR | |
| struct fsm | fsm_pusher |
| timer0 & ISR | |
| void | CAN_rx (can_msg_t *msg) |
| timer0 & ISR | |
| void | init_motors (void) |
| timer0 & ISR | |
| void | set_irq_handler (uint8_t source, uint8_t irq_vect, void(*handler)()) |
| timer0 & ISR | |
| void | timer0_irq () |
| timer0 & ISR | |
| void | init_periphery (void) |
| timer0 & ISR | |
| void | can_send_status (void) |
| timer0 & ISR | |
| void | can_send_len (void) |
| timer0 & ISR | |
| void | can_send_db (void) |
| timer0 & ISR | |
| void | run_fsm (struct fsm *fsm) |
| timer0 & ISR | |
| int | main (void) |
| timer0 & ISR | |
