Lift control application
- controlls the lift and pusher
- program recieves CAN commands about wanted lift/pusher position
- also controls Holded and right chelae.
|
| |
| struct fsm | fsm_lift |
| timer0 & ISR | |
| struct fsm | fsm_pusher |
| timer0 & ISR | |
| void | CAN_rx (can_msg_t *msg) |
| timer0 & ISR | |
| void | init_motors (void) |
| timer0 & ISR | |
| void | set_irq_handler (uint8_t source, uint8_t irq_vect, void(*handler)()) |
| timer0 & ISR | |
| void | timer0_irq () |
| timer0 & ISR | |
| void | init_periphery (void) |
| timer0 & ISR | |
| void | can_send_status (void) |
| timer0 & ISR | |
| void | can_send_len (void) |
| timer0 & ISR | |
| void | can_send_db (void) |
| timer0 & ISR | |
| void | run_fsm (struct fsm *fsm) |
| timer0 & ISR | |
| int | main (void) |
| timer0 & ISR | |
Detailed Description
Lift control application
- controlls the lift and pusher
- program recieves CAN commands about wanted lift/pusher position
- also controls Holded and right chelae.
Function Documentation
| void CAN_rx | ( | can_msg_t * | msg | ) |
timer0 & ISR
Here is the call graph for this function:

| void can_send_db | ( | void | ) |
timer0 & ISR
| void can_send_len | ( | void | ) |
timer0 & ISR
| void can_send_status | ( | void | ) |
timer0 & ISR
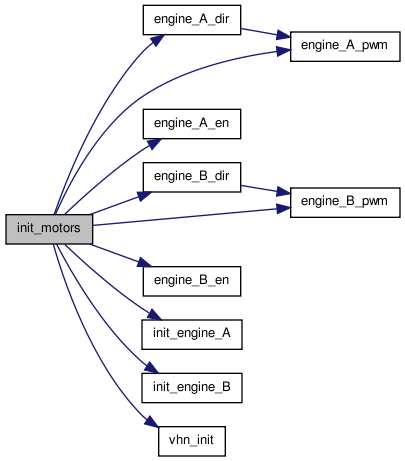
| void init_motors | ( | void | ) |
timer0 & ISR
Here is the call graph for this function:
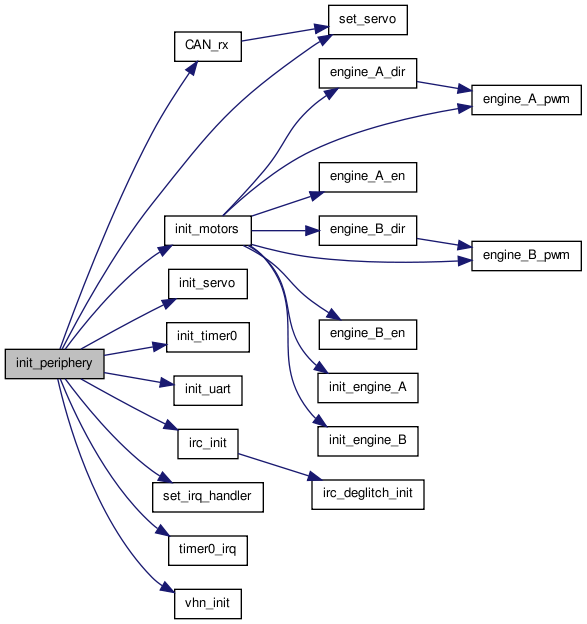
| void init_periphery | ( | void | ) |
timer0 & ISR
Here is the call graph for this function:
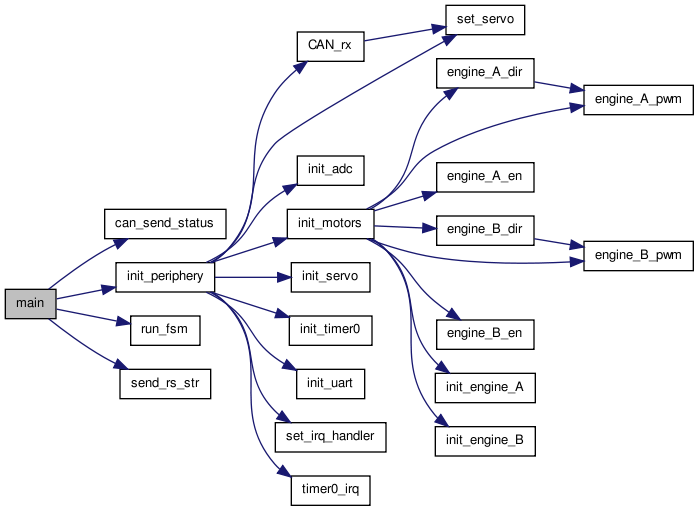
| int main | ( | void | ) |
timer0 & ISR
Here is the call graph for this function:
| void run_fsm | ( | struct fsm * | fsm | ) |
timer0 & ISR
Here is the call graph for this function:
| void set_irq_handler | ( | uint8_t | source, | |
| uint8_t | irq_vect, | |||
| void(*)() | handler | |||
| ) |
timer0 & ISR
| void timer0_irq | ( | ) |
timer0 & ISR
Here is the call graph for this function:

Variable Documentation
| struct fsm fsm_pusher |
timer0 & ISR
