Robots gallery
Eurobot 2007 - Robot Recycling Rally

- Promotion video (.avi,13MB)
- Technical specification
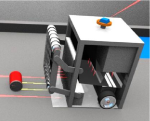
The robot collects and sorts waste. The mechanical parts are based on aluminium construction, rotating cylinders, rubber belts, a number of doors and a conveyor belt. The electronics of the robot consist of the main control unit and several electronic subsystems, based on the Hitachi/Renesas H8S2638 processors. The main control unit is a PowerPC based board running GNU/Linux. The communication between subsystems are mediated by the CAN bus. Robot is powered with two brush-less DC engines by MAXON. Further, we use a couple of types of servos and motors to drive doors and other displaceable components of the robot. The robot is equipped with several tens of IR sensors for waste detection, waste recognition, opponent detection and obstacle detection.
The program development was carried out mostly in C/C++ using free software tools and libraries. The components are designed for versatile use as well as considering the real-time application of the programs. These requirement led us to use components like ORTE (OCERA Real-Time Ethernet) or OMK (OCERA Make System). The robot localization is done using a laser beacon, passive reflectors and an efficient algorithm for mobile robot localization, called Monte Carlo Localization.