#include <orte.h>#include <robottype.h>
Include dependency graph for robomon_orte.h:
This graph shows which files directly or indirectly include this file:
Classes | |
| class | OrteCallbackInfo |
Defines | |
| #define | QEVENT(event) (QEvent::Type)(QEvent::User+(event)) |
| #define | FRONT_DOOR 1 |
| #define | INNER_DOOR 4 |
| #define | BACK_DOOR 0 |
| #define | FRONT_LAUNCH 5 |
| #define | TRANSPORTER_FRONT 2 |
| #define | TRANSPORTER_INNER 3 |
| #define | FRONT_DOOR_UP 20 |
| #define | FRONT_DOOR_DOWN 251 |
| #define | INNER_DOOR_UP 255 |
| #define | INNER_DOOR_DOWN 1 |
| #define | BACK_DOOR_UP 180 |
| #define | BACK_DOOR_DOWN 1 |
| #define | TOP_DOOR_UP 255 |
| #define | TOP_DOOR_DOWN 1 |
| #define | TRANSPORTER_OFF 127 |
| #define | FRONT_LAUNCH_LOCK 195 |
| #define | FRONT_LAUNCH_OPEN 66 |
| #define | MOTOR_LIMIT 10000.0 |
Enumerations | |
| enum | robomon_qev { QEV_MOTION_STATUS = 0, QEV_MOTION_IRC, QEV_REFERENCE_POSITION, QEV_ESTIMATED_POSITION_ODO, QEV_ESTIMATED_POSITION_INDEP_ODO, QEV_ESTIMATED_POSITION_BEST, QEV_SHARP_LONGS, QEV_SHARP_SHORTS, QEV_SHARPS, QEV_POWER_VOLTAGE, QEV_FSM_MAIN, QEV_FSM_ACT, QEV_FSM_MOTION, QEV_HOKUYO_SCAN, QEV_JAWS_CMD } |
| enum | { BOTTLE = 0, CAN, UNKNOWN } |
Functions | |
| void | dummy_publisher_callback (const ORTESendInfo *info, void *vinstance, void *arg) |
| void | sendMotorCallBack (const ORTESendInfo *info, void *vinstance, void *arg) |
| void | sendSharpLongsCallBack (const ORTESendInfo *info, void *vinstance, void *arg) |
| void | sendSharpShortsCallBack (const ORTESendInfo *info, void *vinstance, void *arg) |
| void | sendPowerControlCallBack (const ORTESendInfo *info, void *vinstance, void *arg) |
| void | receiveMotionStatusCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveActualPositionCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveEstimatedPositionCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveSharpLongsCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveSharpShortsCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveSharpsCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveIRCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveDICallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveLaserCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveAccelerometerCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveAccumulatorCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receivePowerVoltageCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | receiveActuatorStatusCallBack (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | rcv_motion_irc_cb (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | rcv_fsm_main_cb (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | rcv_fsm_act_cb (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | rcv_fsm_motion_cb (const ORTERecvInfo *info, void *vinstance, void *arg) |
| void | generic_rcv_cb (const ORTERecvInfo *info, void *vinstance, void *arg) |
Define Documentation
| #define BACK_DOOR 0 |
| #define BACK_DOOR_DOWN 1 |
| #define BACK_DOOR_UP 180 |
| #define FRONT_DOOR 1 |
| #define FRONT_DOOR_DOWN 251 |
| #define FRONT_DOOR_UP 20 |
| #define FRONT_LAUNCH 5 |
| #define FRONT_LAUNCH_LOCK 195 |
| #define FRONT_LAUNCH_OPEN 66 |
| #define INNER_DOOR 4 |
| #define INNER_DOOR_DOWN 1 |
| #define INNER_DOOR_UP 255 |
| #define MOTOR_LIMIT 10000.0 |
| #define TOP_DOOR_DOWN 1 |
| #define TOP_DOOR_UP 255 |
| #define TRANSPORTER_FRONT 2 |
| #define TRANSPORTER_INNER 3 |
| #define TRANSPORTER_OFF 127 |
Enumeration Type Documentation
| enum robomon_qev |
Function Documentation
| void dummy_publisher_callback | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void generic_rcv_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
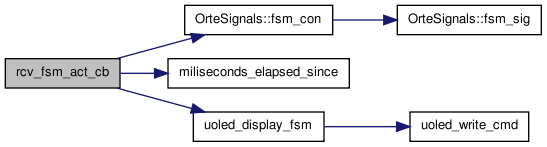
| void rcv_fsm_act_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

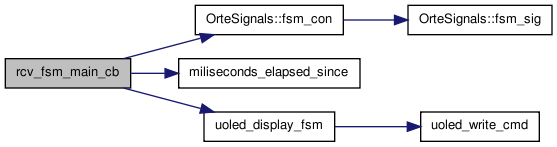
| void rcv_fsm_main_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

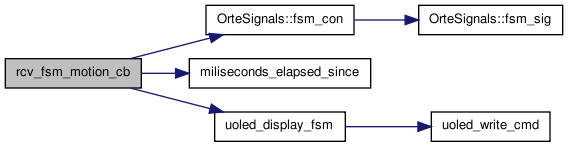
| void rcv_fsm_motion_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void rcv_motion_irc_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void receiveAccelerometerCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveAccumulatorCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveActualPositionCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveActuatorStatusCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveDICallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveEstimatedPositionCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveIRCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveLaserCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveMotionStatusCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receivePowerVoltageCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveSharpLongsCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveSharpsCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void receiveSharpShortsCallBack | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void sendMotorCallBack | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void sendPowerControlCallBack | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void sendSharpLongsCallBack | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
| void sendSharpShortsCallBack | ( | const ORTESendInfo * | info, | |
| void * | vinstance, | |||
| void * | arg | |||
| ) |
