#include <types.h>#include <cpu_def.h>#include <h8s2638h.h>#include <periph/sci_rs232.h>#include <system_def.h>#include <stdlib.h>#include <string.h>#include <pxmc.h>#include <pxmc_h2638.h>#include <cmd_proc.h>#include "cmd_pxmc.h"#include "timer3.h"#include <stdio.h>
Include dependency graph for mirosot_autodemo.c:

Defines | |
| #define | _USE_EXR_LEVELS 1 |
| #define | WHEEL_DIST 74 |
| #define | MAX_R 300 |
| #define | MIN_R (WHEEL_DIST/2) |
Functions | |
| void | unhandled_exception (void) |
| int | cmd_rs232_processor_run (void) |
| void | _print (char *str) |
| void | init (void) |
| void | move (int speed, int r) |
| void | main_loop (void) |
| int | main () |
Variables | |
| cmd_des_t const | cmd_des_help |
| cmd_des_t const * | cmd_rs232_default [] |
| cmd_des_t const ** | cmd_bth = cmd_rs232_default |
| cmd_des_t const ** | cmd_rs232 = cmd_rs232_default |
| pxmc_state_t | mcsX0 |
| pxmc_state_t | mcsX1 |
| pxmc_state_t * | pxmc_main_arr [] = {&mcsX0,&mcsX1} |
| pxmc_state_list_t | pxmc_main_list |
Define Documentation
| #define _USE_EXR_LEVELS 1 |
| #define MAX_R 300 |
| #define MIN_R (WHEEL_DIST/2) |
| #define WHEEL_DIST 74 |
Function Documentation
| void _print | ( | char * | str | ) |
Here is the caller graph for this function:
| int cmd_rs232_processor_run | ( | void | ) |
Here is the caller graph for this function:

| void init | ( | void | ) |
Here is the call graph for this function:
Here is the caller graph for this function:
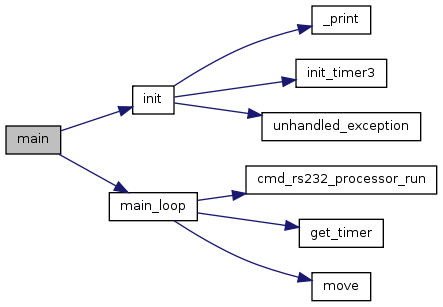
| int main | ( | void | ) |
Here is the call graph for this function:
| void main_loop | ( | void | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void move | ( | int | speed, | |
| int | r | |||
| ) |
Here is the caller graph for this function:
| void unhandled_exception | ( | void | ) |
Here is the caller graph for this function:
Variable Documentation
| cmd_des_t const** cmd_bth = cmd_rs232_default |
| cmd_des_t const cmd_des_help |
Initial value:
{0, 0,"HELP","prints help for commands",
cmd_do_help,{(char*)&cmd_rs232}}
| cmd_des_t const** cmd_rs232 = cmd_rs232_default |
| cmd_des_t const* cmd_rs232_default[] |
Initial value:
{
&cmd_des_help,
CMD_DES_CONTINUE_AT,
(cmd_des_t*)cmd_pxmc_default,
NULL
}
| pxmc_state_t mcsX0 |
Initial value:
{
pxms_flg:0,
pxms_do_inp:0,
pxms_do_con:0,
pxms_do_out:0,
pxms_do_deb:0,
pxms_do_gen:0,
pxms_ap:0, pxms_as:0,
pxms_rp:155l*256,
pxms_rs:0,
pxms_md:8000l<<8, pxms_ms:5000, pxms_ma:10,
pxms_inp_info:(long)TPU_TCNT1,
pxms_out_info:(long)PWM_PWBFR1A,
pxms_ene:0, pxms_erc:0,
pxms_p:40, pxms_i:0, pxms_d:1, pxms_s1:0, pxms_s2:0,
pxms_me:0x1800,
pxms_ptirc:40,
pxms_ptper:1,
pxms_ptptr1:NULL,
pxms_ptptr2:NULL,
pxms_cfg:PXMS_CFG_MD2E_m|PXMS_CFG_HLS_m|
PXMS_CFG_HPS_m|PXMS_CFG_HDIR_m|0x1
}
| pxmc_state_t mcsX1 |
Initial value:
{
pxms_flg:0,
pxms_do_inp:0,
pxms_do_con:0,
pxms_do_out:0,
pxms_do_deb:0,
pxms_do_gen:0,
pxms_ap:0, pxms_as:0,
pxms_rp:155l*256,
pxms_rs:0,
pxms_md:8000l<<8, pxms_ms:5000, pxms_ma:10,
pxms_inp_info:(long)TPU_TCNT2,
pxms_out_info:(long)PWM_PWBFR1C,
pxms_ene:0, pxms_erc:0,
pxms_p:40, pxms_i:0, pxms_d:1, pxms_s1:0, pxms_s2:0,
pxms_me:0x1800,
pxms_ptirc:40,
pxms_ptper:1,
pxms_ptptr1:NULL,
pxms_ptptr2:NULL,
pxms_cfg:PXMS_CFG_MD2E_m|PXMS_CFG_HLS_m|
PXMS_CFG_HPS_m|PXMS_CFG_HDIR_m|0x1
}
| pxmc_state_t* pxmc_main_arr[] = {&mcsX0,&mcsX1} |
| pxmc_state_list_t pxmc_main_list |
Initial value:
{
pxml_arr:pxmc_main_arr,
pxml_cnt:sizeof(pxmc_main_arr)/sizeof(pxmc_main_arr[0])
}
