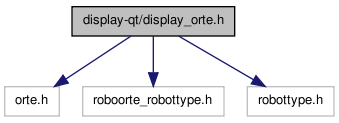
#include <orte.h>#include <roboorte_robottype.h>#include <robottype.h>
Include dependency graph for display_orte.h:
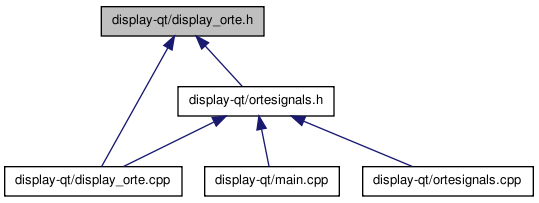
This graph shows which files directly or indirectly include this file:
Functions | |
| bool | miliseconds_elapsed_since (struct timespec *t, unsigned miliseconds) |
| int | timespec_subtract (struct timespec *result, struct timespec *x, struct timespec *y) |
| Subtract the `struct timespec' values X and Y, storing the result in RESULT (result = x - y). | |
| void | rcv_pwr_voltage_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_odo_data_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_robot_cmd_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_robot_swicthes_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_motion_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_lift_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_jaws_status_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_camera_result_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_hokuyo_scan_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_est_pos_best_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_fsm_main_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_fsm_act_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_fsm_motion_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
| void | rcv_match_time_cb (const ORTERecvInfo *info, void *vinstance, void *recvCallBackParam) |
Function Documentation
| bool miliseconds_elapsed_since | ( | struct timespec * | t, | |
| unsigned | miliseconds | |||
| ) |
Here is the call graph for this function:

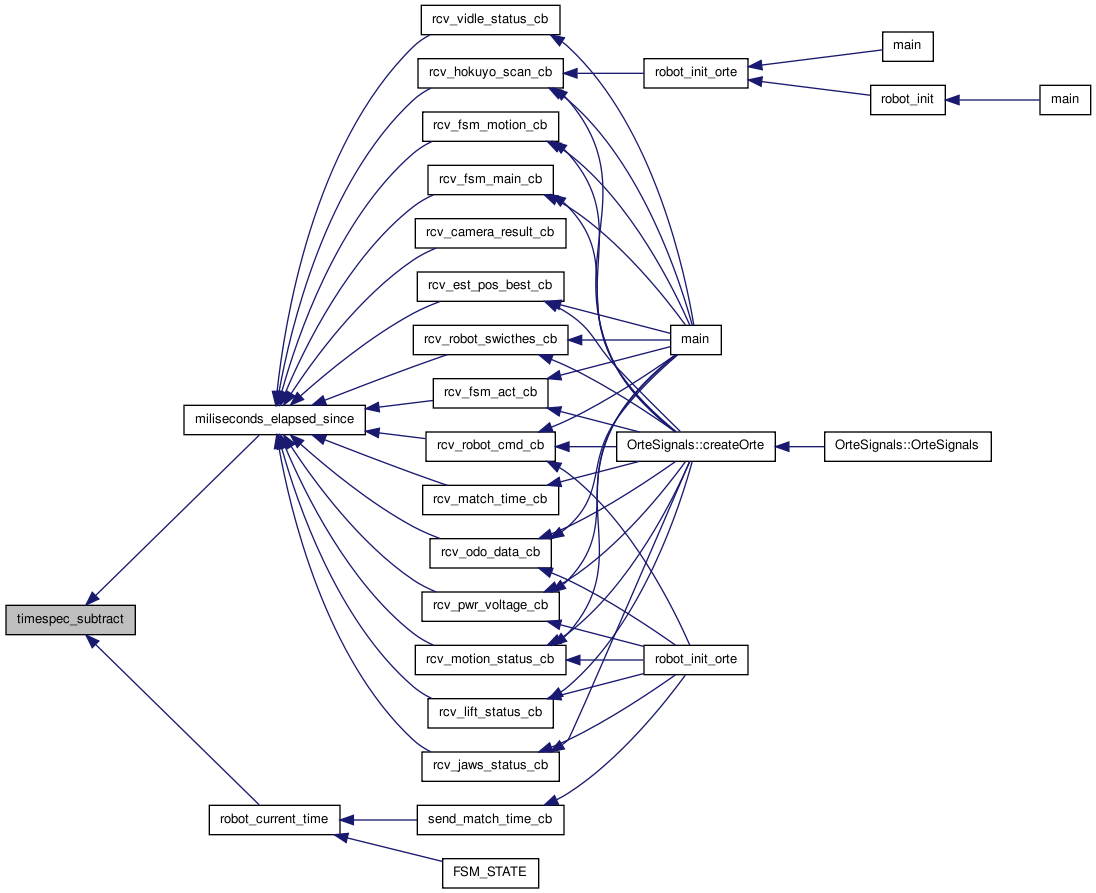
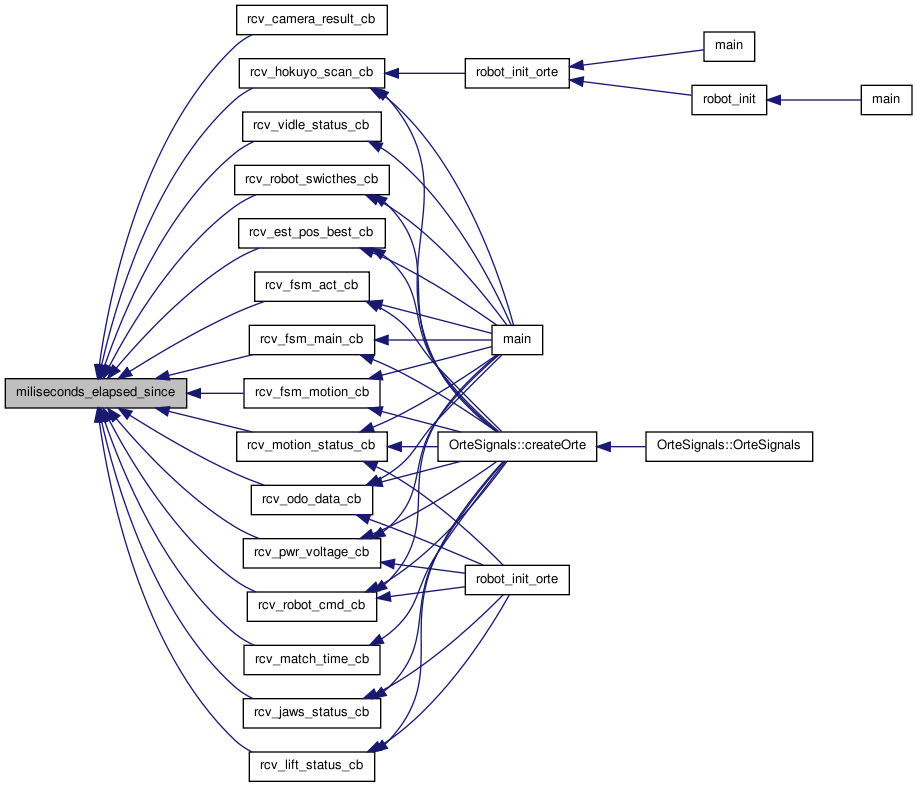
Here is the caller graph for this function:
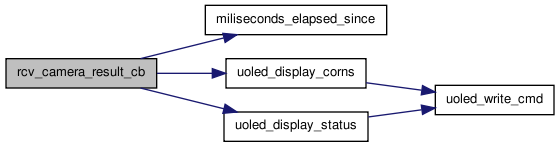
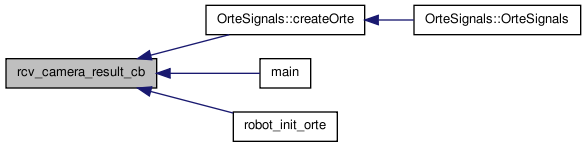
| void rcv_camera_result_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
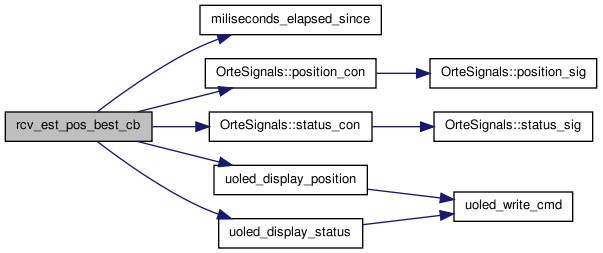
| void rcv_est_pos_best_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void rcv_fsm_act_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
| void rcv_fsm_main_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
| void rcv_fsm_motion_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
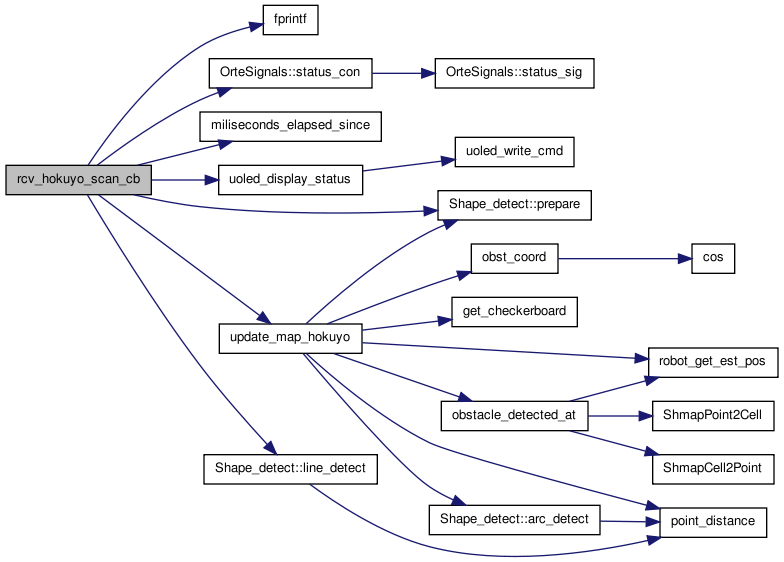
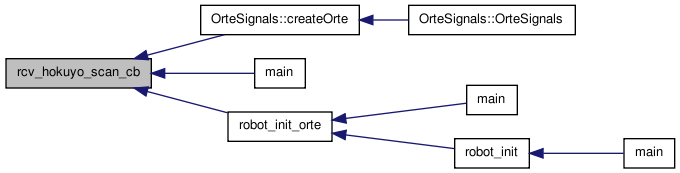
| void rcv_hokuyo_scan_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
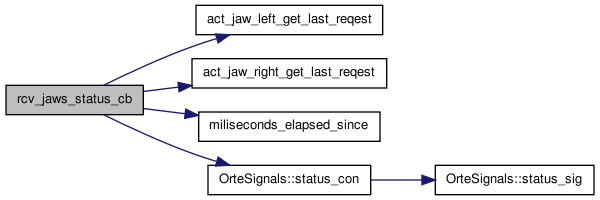
| void rcv_jaws_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

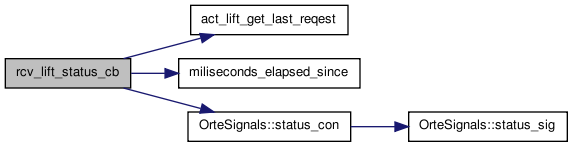
| void rcv_lift_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

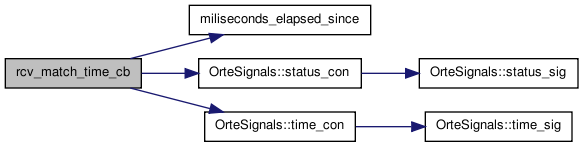
| void rcv_match_time_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

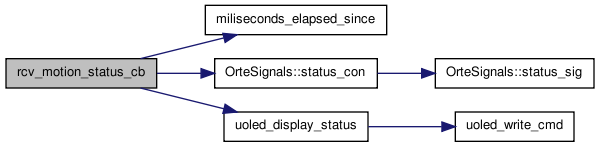
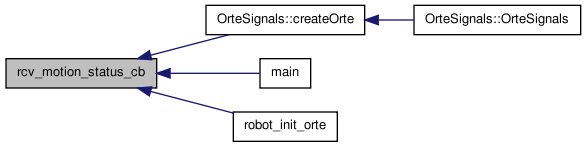
| void rcv_motion_status_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
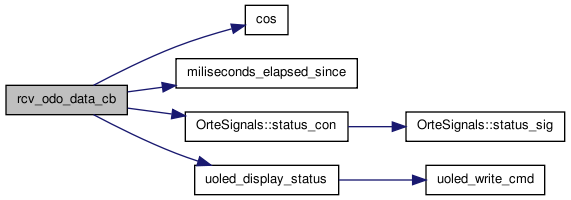
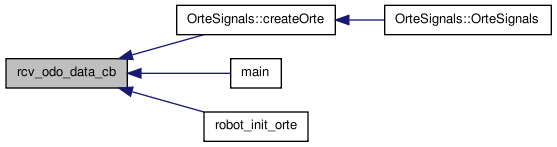
| void rcv_odo_data_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
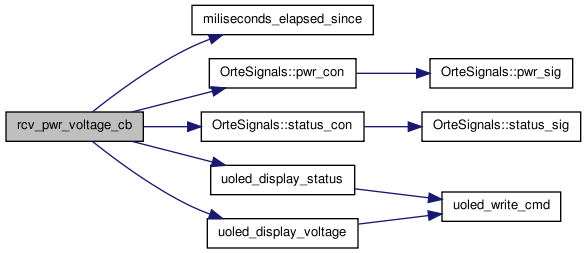
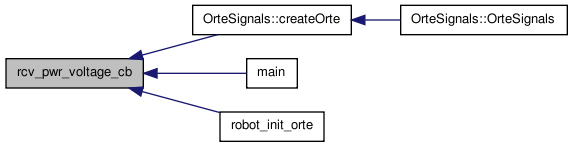
| void rcv_pwr_voltage_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
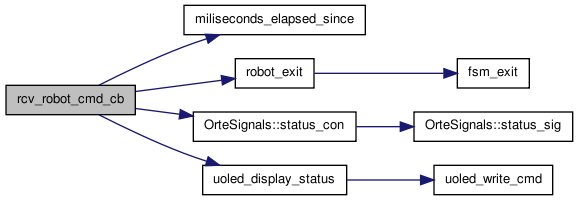
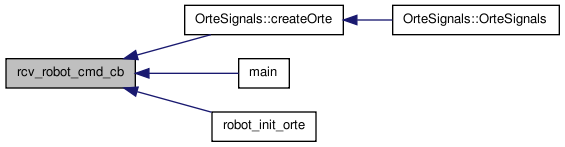
| void rcv_robot_cmd_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
| void rcv_robot_swicthes_cb | ( | const ORTERecvInfo * | info, | |
| void * | vinstance, | |||
| void * | recvCallBackParam | |||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| int timespec_subtract | ( | struct timespec * | result, | |
| struct timespec * | x, | |||
| struct timespec * | y | |||
| ) |
Subtract the `struct timespec' values X and Y, storing the result in RESULT (result = x - y).
Return 1 if the difference is negative, otherwise 0.
Here is the caller graph for this function: