#include <robot.h>#include <fsm.h>#include <unistd.h>#include <math.h>#include <movehelper.h>#include <map.h>#include <sharp.h>#include <robomath.h>#include <string.h>#include <robodim.h>#include <error.h>#include "../corns_configs.h"#include "../actuators.h"#include "../match-timing.h"#include "../eb2010misc.h"#include "../common-states.h"
Include dependency graph for tune_vidle.cc:

Defines | |
| #define | FSM_MAIN |
Functions | |
| FSM_STATE (test_vidle) | |
| int | main () |
Define Documentation
| #define FSM_MAIN |
Function Documentation
| FSM_STATE | ( | test_vidle | ) |
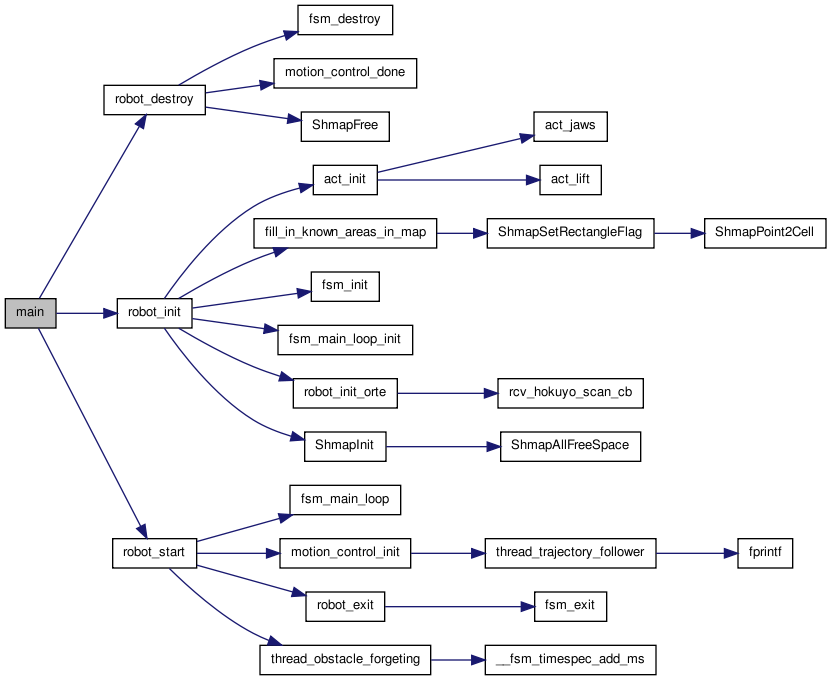
| int main | ( | void | ) |
Here is the call graph for this function: