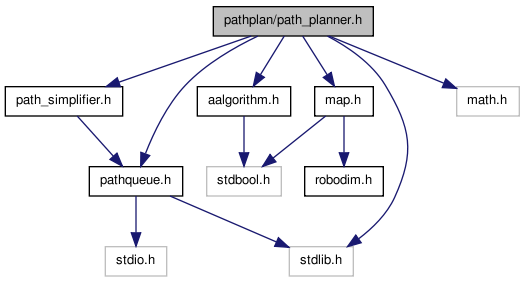
#include "aalgorithm.h"#include "path_simplifier.h"#include "pathqueue.h"#include "map.h"#include <stdlib.h>#include <math.h>
Include dependency graph for path_planner.h:
This graph shows which files directly or indirectly include this file:

Defines | |
Path Planner Error Codes | |
| #define | PP_ERROR_MAP_NOT_INIT -1 |
| #define | PP_ERROR_GOAL_IS_OBSTACLE -2 |
| #define | PP_ERROR_GOAL_NOT_REACHABLE -3 |
Functions | |
| int | path_planner (double xstart_real, double ystart_real, double xgoal_real, double ygoal_real, PathPoint **simple_path, double *angle) |
| Returns the number of points of the path on success or an error code. | |
