Table of Contents
Scheduling algorithms have very close relation to graph algorithms. Scheduling toolbox offer an object graph (see section Chapter 6, Graphs) with several graph algorithms.
List of algorithms related to operations with object graph are summarized in Table 9.1, “List of algorithms”.
| algorithm | command | note |
|---|---|---|
| Minimum spanning tree | spanningtree | Polynomial |
| Dijkstra's algorithm | dijkstra | Polynomial |
| Floyd | floyd | Polynomial |
| Minimum Cost Flow | mincostflow | Using LP |
| Critical Circuit Ratio | criticalcircuitratio | Using LP |
| Hamilton circuit | hamiltoncircuit | NP-hard |
| Quadratic Assignment Problem | qap | NP-hard |
Table 9.1. List of algorithms
Spanning tree of the graph is a subgraph which is a tree and connects all the vertices together. A minimum spanning tree is then a spanning tree with minimal sum of the edges cost. A greedy algorithm with polynomial complexity is used to solve this problem (for more details see Demel02). The toolbox function has following syntax:
gmin = spanningtree(g)
- gmin
minimum spanning tree represented by graph
- g
input graph
Dijkstra's algorithm is an algorithm that solves the single-source cost of shortest path for a directed graph with nonnegative edge weights. Inptut of this algorithm is a directed graph with costs of invidual edges and reference node r from which we want to find shortest path to other nodes. Output is an array with distances to other nodes.
distances = dijkstra(g,r)
- g
graph object
- r
reference node
Floyd is a well known algorithm from the graph theory
[Diestel00]. This algorithm
finds a matrix of shortest paths for a given graph. Input to the algorithm
is an object graph, where the weights of edges are set in
UserParam variables of edges. Output is a matrix of
shortest paths (U) and optionally matrix
of the vertex predecessors (P) in the
shortest path and adjacency matrix of lengths (M). Algorithm can be run as follows:
[U,P,M] = floyd(g)
The variable g is an instance of graph
object.
The Strongly Connected Components (SCC) of a directed graph are
maximal subgraphs for which hold every couple of nodes
u and v there is a path from
u to v and a path from
v to u. For SCC searching Tarjan
algorithm is usullay used.
The algorithm is based on depth-first search where the nodes are placed on a stack in the order in which they are visited. When the search returns from a subtree, it is determined whether each node is the root of a SCC. If a node is the root of a SCC, then it and all of the nodes taken off before it form that SCC. The detailed describtion of the algorithm is in [DSVF06]. SCC in a graph G can be found as follows:
scc = tarjan(g)
where scc is a vector where the element
scc(i) is number of component where the node
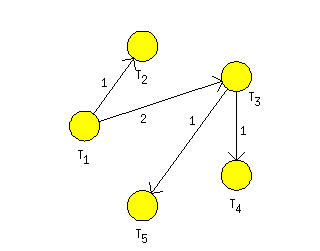
i belongs to. For graph in Figure 9.5, “A simple network with optimal flow in the fourth user parameter
on edges” the algorithm returns fllowing
results.
The minimum cost flow model is the most fundamental of all network
flow problems. In this problem we wish to determine a least cost shipment
of a commodity through a network in order to satisfy demands at certain
nodes from available supplies at other nodes [Ahuja93]. Let G=(N,A) be a
directed network defined by set N of n nodes and a set
A of m directed edges. Each edge
(i,j)