Main program of Path Planner. More...
#include "path_planner.h"#include <pthread.h>
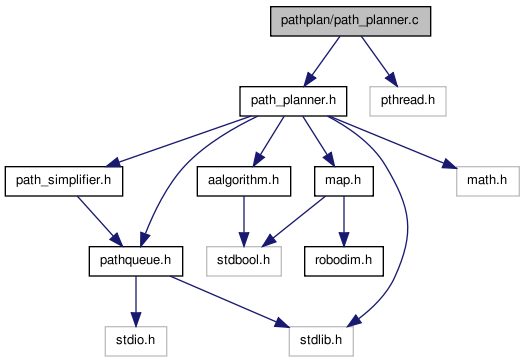
Include dependency graph for path_planner.c:
|
| |
| #define | DBG printf |
| Returns the number of points of the path on success or an error code. | |
| int | path_planner (double xstart_real, double ystart_real, double xgoal_real, double ygoal_real, PathPoint **simple_path, double *angle) |
| Returns the number of points of the path on success or an error code. | |
Detailed Description
Main program of Path Planner.
- Warning:
- This library needs map library to work!
