Defines | |
| #define | _ISOC99_SOURCE |
| #define | _XOPEN_SOURCE |
Functions | |
| int | getPathLength (int xstart, int ystart, int xgoal, int ygoal) |
| void | GraphCell2XY (GraphMapCell *c, int *x, int *y) |
| Returns X and Y index of a graph cell identified by a pointer. | |
A* Implementation Functions | |
This functions have not a meaning in A* algorithm, but are needed for implementation. | |
| void | initGraphStructure (void) |
| Init Graph structure with default values. | |
A* related functions | |
This functions have a meaning in theorical A*. | |
| float | cFunction (int x1, int y1, int x2, int y2) |
| Calculates the lenght of edge connecting two points. | |
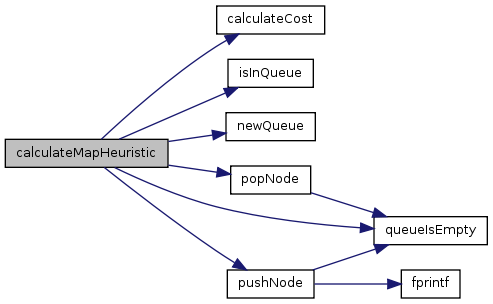
| void | calculateMapHeuristic (int xgoal, int ygoal) |
| Calculates Map Heuristic values. | |
| float | calculateCost (int x1, int y1, int x2, int y2) |
| Calculates the cost of moving from the first cell to the second cell. | |
A* Main function | |
|
| |
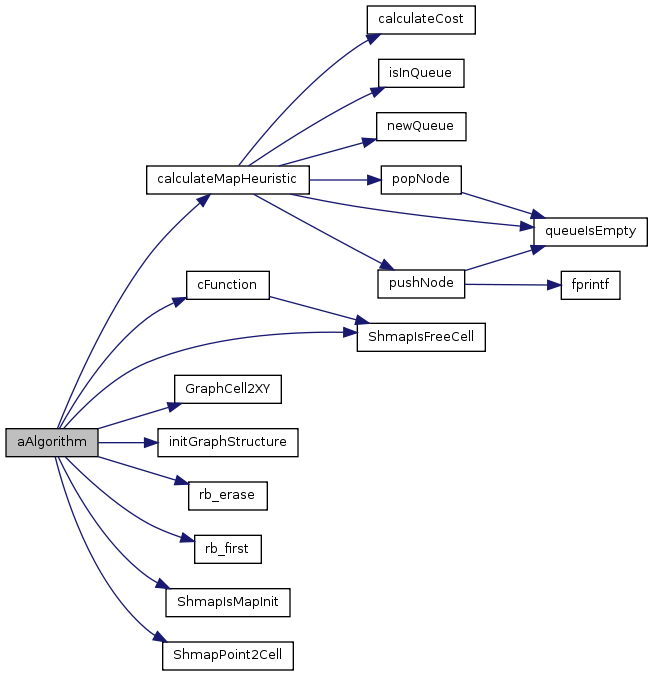
| int | aAlgorithm (double xstart_real, double ystart_real, double xgoal_real, double ygoal_real, GraphMapCell **original_path) |
| Search the shortest path between two points. | |
Path simplifier functions | |
|
| |
| PathPoint * | newPathPoint (PathPoint *last, float x, float y) |
| Put the REAL coordonates (X,Y) in a list of points. | |
| void | calc_line (float x1, float y1, float x2, float y2, Line *l) |
| Calc line parameters from two points. | |
| float | calc_dist (Line *l, float x, float y) |
| Calc the distance between a line and a point. | |
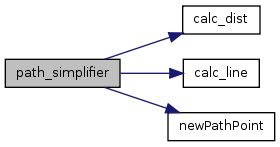
| int | path_simplifier (PathPoint *path, int nbpoints, PathPoint *first_point, double *angle) |
| Simplify a given path. | |
Queue functions | |
This functions implements a queue needed by other functions. | |
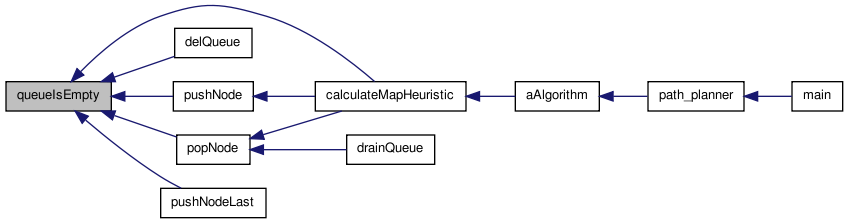
| int | queueIsEmpty (NodeQueue *q) |
| Tests if a queue is empty. | |
| void | pushNode (NodeQueue *q, int x, int y) |
| Push a node into the queue in a FIFO mode. | |
| void | pushNodeLast (NodeQueue *q, int x, int y) |
| Push a node into the queue in a LIFO mode. | |
| int | popNode (NodeQueue *q, Node *n) |
| Pop the first node of the queue. | |
| void | printQueue (NodeQueue *q) |
| Print the queue. | |
| NodeQueue * | newQueue (void) |
| Init queue values. | |
| int | delQueue (NodeQueue *q) |
| Free queue memory. | |
| int | isInQueue (NodeQueue *q, int x, int y) |
| Finds out if the node (X,Y) is in the queue. | |
| void | drainQueue (NodeQueue *q) |
| Free memory allocated in the queue. | |
A* Constants | |
|
| |
| #define | SQRT2 M_SQRT2 |
| Root square of two. | |
| #define | WALL_COST 1000 |
| Cost of jumping a wall. | |
Detailed Description
Path Planer Architecture
PathPlaner is composed of three sublibraries or modules:
- aalgorithm.c : is the implementation of A* Algorithm. More details in aalgorithm().
- path_simplifier.c : The result path of A* is a set of discrete cells (or pixels) that should be simplify. More details in path_simplifier().
- pathqueue.c : It is an implementation of a points queue used by the others modules.
Define Documentation
| #define _ISOC99_SOURCE |
| #define _XOPEN_SOURCE |
| #define SQRT2 M_SQRT2 |
Root square of two.
| #define WALL_COST 1000 |
Cost of jumping a wall.
Function Documentation
| int aAlgorithm | ( | double | xstart_real, | |
| double | ystart_real, | |||
| double | xgoal_real, | |||
| double | ygoal_real, | |||
| GraphMapCell ** | original_path | |||
| ) |
Search the shortest path between two points.
- Parameters:
-
xstart_real Coordonate X of the start point ystart_real Coordonate Y of the start point xgoal_real Coordonate X of the goal point ygoal_real Coordonate Y of the goal point original_path [out] Pointer to the first map cell of the path is stored here. Use GraphMapCell.next to traverse the found path.
- See also:
- graph
- Returns:
- -1 if the goal is not founded, the number of points to the goal is founded on success.
This is an implementation of A* Algorithm (Algorithm 24, p531) defined in the book "Principles of Robot Motion" by H. Choset&others
prioritySet : Set of nodes to process order by heuristic distance
nbest : Best node to reach the goal
-
Init graph structure with default values.
-
Calculate Heuristic distances.
-
Initial values : put start node in queue.
-
Expand nbest :for all x E Star(nbest) that are not in C
-
REPEAT until the queue is empty.
-
Pick nbest from prioritySet and remove
-
add to processed
-
IF nbest == goal ; EXIT
-
Expand nbest :for all x E Star(nbest) that are not in C
-
IF is not in Priorityset add to prioritySet.
-
ELSE update backpointer to point to nbest.
-

| float calc_dist | ( | Line * | l, | |
| float | x, | |||
| float | y | |||
| ) |
Calc the distance between a line and a point.
- Parameters:
-
l A pointer to line parameters x Coordonate X of the point y Coordonate Y of the point
- Returns:
- Cross cost
If it is a hotizontal line, the distance is the difference between y coordonate and b parameter.
If it is a vertical line, the distance is the difference between x coordonate and b parameter.
If it is a oblicuous line, the distance is  .
.

| void calc_line | ( | float | x1, | |
| float | y1, | |||
| float | x2, | |||
| float | y2, | |||
| Line * | l | |||
| ) |
Calc line parameters from two points.
- Parameters:
-
x1 Coordonate X of the first point y1 Coordonate Y of the first point x2 Coordonate X of the second point y2 Coordonate Y of the second point l A pointer to line parameters
Returns parameters of a line : a1 * x + a2 * y = b

| float calculateCost | ( | int | x1, | |
| int | y1, | |||
| int | x2, | |||
| int | y2 | |||
| ) |
Calculates the cost of moving from the first cell to the second cell.
- Parameters:
-
x1 Coordonate X of the first cell y1 Coordonate Y of the first cell x2 Coordonate X of the second cell y2 Coordonate Y of the second cell
- Returns:
- Cross cost
- Warning:
- Cells must be contiguous

| void calculateMapHeuristic | ( | int | xgoal, | |
| int | ygoal | |||
| ) |
Calculates Map Heuristic values.
- Parameters:
-
xgoal Coordonate X of the goal ygoal Coordonate Y of the goal
This function calculates the map heuristic values (the distance to the goal that is supoused to be the shortest).
The chosen method has been the euclidean distance. The distance between a point of the grid  and the goal
and the goal  is
is  .
.
Another method explained in the book is coded but not used.It is called Brushfire algorithm. (section 4.3.2 of the book)

| float cFunction | ( | int | x1, | |
| int | y1, | |||
| int | x2, | |||
| int | y2 | |||
| ) |
Calculates the lenght of edge connecting two points.
- Parameters:
-
x1 Coordonate X of the first cell y1 Coordonate Y of the first cell x2 Coordonate X of the second cell y2 Coordonate Y of the second cell
- Returns:
- Lenght of edge


| int delQueue | ( | NodeQueue * | q | ) |
Free queue memory.
- Parameters:
-
q Queue
- Returns:
- 1 if memory was succesfully free 0 if the queue is not empty

| void drainQueue | ( | NodeQueue * | q | ) |
Free memory allocated in the queue.
- Parameters:
-
q Queue

| int getPathLength | ( | int | xstart, | |
| int | ystart, | |||
| int | xgoal, | |||
| int | ygoal | |||
| ) |
| void GraphCell2XY | ( | GraphMapCell * | c, | |
| int * | x, | |||
| int * | y | |||
| ) |
Returns X and Y index of a graph cell identified by a pointer.
- Parameters:
-
[in] c Pointer to the cell in question. [out] x Cell's X index. [out] y Cell's Y index.

| void initGraphStructure | ( | void | ) |
Init Graph structure with default values.
- See also:
- graph

| int isInQueue | ( | NodeQueue * | q, | |
| int | x, | |||
| int | y | |||
| ) |
Finds out if the node (X,Y) is in the queue.
- Parameters:
-
q Queue x Coordonate X of a cell y Coordonate Y of a cell
- Returns:
- 1 if (X,Y) was founded, 0 otherwise

Put the REAL coordonates (X,Y) in a list of points.
- Parameters:
-
last Last point of the points list x Coordonate X of the first cell y Coordonate Y of the first cell
- Returns:
- A pointer to allocated memory

| NodeQueue* newQueue | ( | void | ) |
Init queue values.

Simplify a given path.
- Parameters:
-
path A pointer to a list of points of the original path nbpoints Number of points of the original path first_point [out] A pointer to the list of points of simplest path angle [out] Angle of the last line
- Returns:
- Number of point of the simplest path
This is an algorithm who tries to simplify the path given by A* Algorithm (
- See also:
- aalgorithm()). Basically, the algorithm works that follows: # Takes two points of the original path. # Calculates the line between them. # Calculates the distance between this line and all the points of the original path. If this distance is acceptable (less than PATH_ERROR), the line is part of the simply path. If not, goes to 1 taking two closer points . # The process finish when the last point is the final point.
In pseudo-code:
first_index = 0;
last_index = nbpoints;
step = (last_index - first_index)/2
WHILE (the first index less than nbpoints )
Calc the line
FOR all the points between path[first_index] and path[last_index]
calc the distance betwen the point and the line
Take the max_error
END FOR
IF max_error less than ACCEPTABLE_ERROR THEN
The line is part of the simple path.
first_index = last_index
last_index = last_index + step
ELSE reduce last_index
step = (last_index - first_index)/2
last_index = last_index - step;
END IF
END WHILE

Pop the first node of the queue.
- Parameters:
-
q Queue n Pointer to a node
- Returns:
- 1 if node was succesfully poped 0 if the queue is empty


| void printQueue | ( | NodeQueue * | q | ) |
Print the queue.
- Parameters:
-
q Queue
- Note:
- Used only for debug
| void pushNode | ( | NodeQueue * | q, | |
| int | x, | |||
| int | y | |||
| ) |
Push a node into the queue in a FIFO mode.
- Parameters:
-
q Queue x Coordonate X of a cell y Coordonate Y of a cell

| void pushNodeLast | ( | NodeQueue * | q, | |
| int | x, | |||
| int | y | |||
| ) |
Push a node into the queue in a LIFO mode.
- Parameters:
-
q Queue x Coordonate X of a cell y Coordonate Y of a cell
| int queueIsEmpty | ( | NodeQueue * | q | ) |
Tests if a queue is empty.
- Parameters:
-
q A queue
- Returns:
- 1 if the queue is empty, 0 otherwise