#include <lpc21xx.h>#include <string.h>#include <deb_led.h>#include <system_def.h>#include <periph/can.h>#include "uar.h"
Include dependency graph for main.c:

Classes | |
| struct | rx_canlog_msg_s |
Defines | |
| #define | CAN_SPEED 100000 |
| #define | CAN_ISR 0 |
| #define | TIME1MS ((CPU_APB_HZ) / 1000) |
| #define | CAN_MAX_DATA_BUF 20 |
| #define | SWITCH_LISTEN '1' |
| #define | SWITCH_SEND '2' |
| #define | SWITCH_SENDLISTEN '3' |
| #define | SWITCH_BAUD '4' |
Functions | |
| void | delay (int time) |
| �ҋ@ | |
| void | dummy_wait (uint32_t time) |
| void | print_dec (int test) |
| void | can_rx (can_msg_t *msg) |
| void | tc1 (void) |
| void | init_time (unsigned rx_isr_vect) |
| void | print_msg (void) |
| char | printMenu (void) |
| void | flush_page (void) |
| char | checkData (char data[], char count) |
| void | send_can_msg (char wait) |
| int | main (void) |
Variables | |
| volatile uint32_t | time_ms = 0 |
| can_msg_t | msg |
| struct rx_canlog_msg_s | rx_canlog_msg |
| volatile int | time = 0 |
| unsigned int | time_delay = 0 |
Define Documentation
| #define CAN_ISR 0 |
| #define CAN_MAX_DATA_BUF 20 |
| #define CAN_SPEED 100000 |
| #define SWITCH_BAUD '4' |
| #define SWITCH_LISTEN '1' |
| #define SWITCH_SEND '2' |
| #define SWITCH_SENDLISTEN '3' |
| #define TIME1MS ((CPU_APB_HZ) / 1000) |
Function Documentation
| void can_rx | ( | can_msg_t * | msg | ) |
| char checkData | ( | char | data[], | |
| char | count | |||
| ) |
Here is the caller graph for this function:

| void delay | ( | int | time | ) |
�ҋ@
�w�肳�ꂽ���Ԃ����ҋ@����
- Parameters:
-
[in] msec �ҋ@���� [msec]
�ҋ@
need to implement overflow when needed durations in days..
| void dummy_wait | ( | uint32_t | time | ) |
| void flush_page | ( | void | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void init_time | ( | unsigned | rx_isr_vect | ) |
Here is the call graph for this function:
Here is the caller graph for this function:
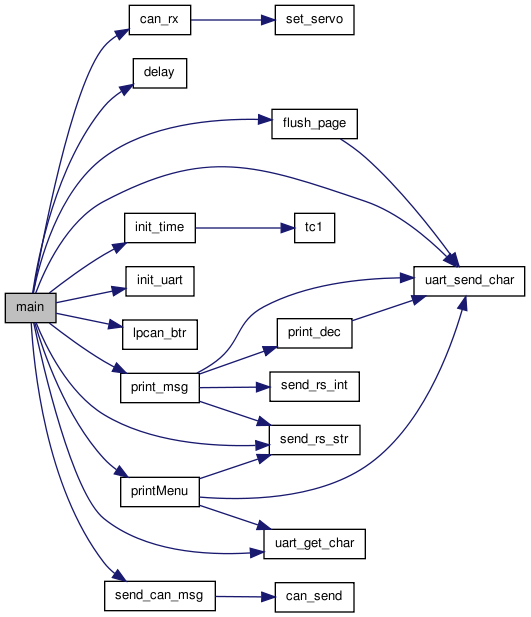
| int main | ( | void | ) |
Here is the call graph for this function:
| void print_dec | ( | int | test | ) |
Here is the call graph for this function:

Here is the caller graph for this function:

| void print_msg | ( | void | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| char printMenu | ( | void | ) |
Here is the call graph for this function:
Here is the caller graph for this function:

| void send_can_msg | ( | char | wait | ) |
Here is the call graph for this function:
| void tc1 | ( | void | ) |
Here is the caller graph for this function:
Variable Documentation
| can_msg_t msg |
| struct rx_canlog_msg_s rx_canlog_msg |
| volatile int time = 0 |
| unsigned int time_delay = 0 |
| volatile uint32_t time_ms = 0 |
